东莞自动化培训专家为您介绍工业机器人性能参数
东莞工业机器人培训专家表示,机器人的技术参数反映了机器人可胜任的工作、具有的最高操作性能等情况,是机器人选型必须考虑的问题。机器人的主要技术参数有自由度、分辨率、工作空间、工作速度、工作载荷等。
(1)自由度 机器人具有的独立坐标轴运动的数目,末端执行器的动作不包括在内。机器人的自由度数一般等同于关节数目,目前,焊接和涂装作业机器人多为6个自由度,而搬运、码垛和装配机器人多为4~6个自由度。
(2)工作范围 又称为作业空间,它是指机器人未安装末端执行器时,其手腕参考点所能到达的所有空间区域,其形状取决于机器人的自由度数和各运动关节的类型与配置,通常需要剔除机器人运动过程中可能产生碰撞、干涉的区域和奇点。
奇点又称奇异点,机器人的奇异点是这样规定的:由两个或多个机器人轴的共线对准所引起的、机器人运动状态和速度不可预测的点。以ABB IRB1410为例,当机器人关节轴5角度为0度,同时关节轴4和关节轴6的度数是一样时,则机器人处于奇异点。
(3)工作速度 机器人在工作载荷条件下、匀速运动过程中,机械接口中心或工具中心点在单位时间内所移动的距离或转动的角度。
(4)工作载荷 指机器人在工作范围内任何位置上所能承受的最大负载,一般用质量、力矩、惯性矩表示。还和运行速度和加速度大小方向有关,一般规定高速运行时所能抓取的工件重量作为承载能力指标。
(5)分辨率 能够实现的最小移动距离或最小转动角度。
(6)工作精度 是指机器人的定位精度和重复定位精度。定位精度是指机器人执行末端到达目标位置的能力,也成为绝对精度;重复定位精度是指机器人重复定位其执行末端于同一目标位置的能力。
在机器人选型过程中,如果要知道某款机器人是否符合工作要求,可以查询机器人的随机光盘手册,也可以通过官网进行查询。下面东莞自动化培训专家接以查询ABB IRB1200性能参数向大家进行介绍。
1. 通过随机光盘查阅
详细步骤为:打开随机光盘,1选择语言【Chinese】—2选择【产品规格】—3选择【关节机器人】—4选择【产品规格-IRB1200】即可进行查阅,如图1-18~图1-19所示。
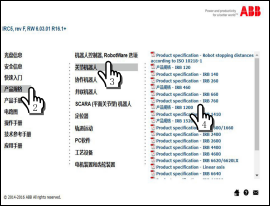
图1-19
图1-18
2. 通过官网进行查阅
访问ABB官网也可查询到指定型号机器人的规格参数。例如,访问如下网址:https://new.abb.com/products/robotics/zh/industrial-robots/irb-1200,或是从ABB官网主页按以下步骤进入:首页—产品指南—机器人技术—工业机器人—IRB 1200,可以下载到IRB1200的产品规格描述文件,如图1-20所示。

更多资讯:智通教育(www.xue5156.com)致力于工业机器人培训、PLC培训、电工培训等行业课程,详情联系:0769-8707-8535.
 粤公网安备 44190002001278
粤公网安备 44190002001278





