干货来啦!ABB机器人手动操作技巧说明
在现场调试机器人,示教器的使用必不可少。智通培训机器人工程师教您使用示教器:
1.校准
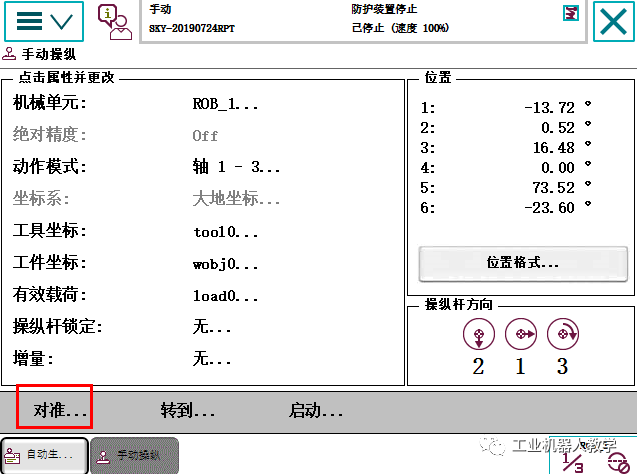
所在位置:主菜单-手动操纵-对准…使用说明:对准的含义是使当前选定工具的坐标系Z轴与参考坐标(大地坐标、基座标、工件坐标)的各轴就近对齐。关于就近对准,我们通过下面两个图示进行说明。
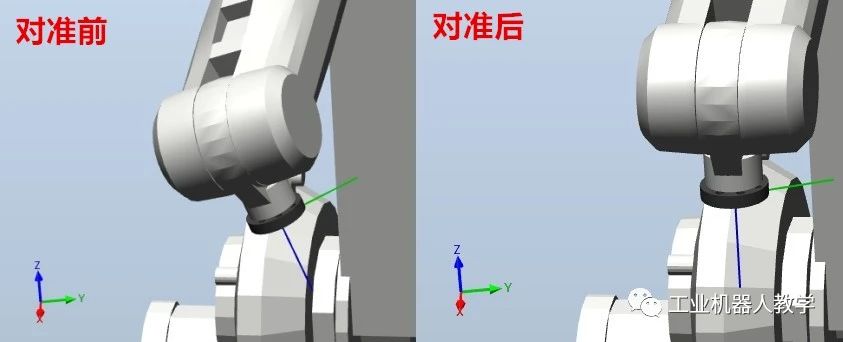
此图中,工具坐标系Z轴更趋近与大地坐标系的Z轴,所以执行“对准”操作后,工具坐标系Z轴与大地坐标系的Z轴平行。
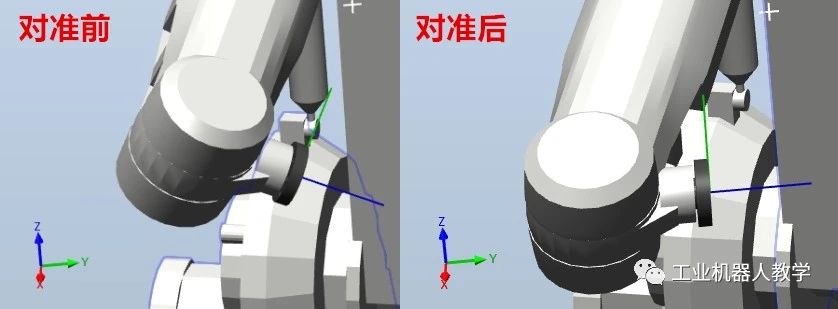
此图中,工具坐标系Z轴更趋近与大地坐标系的Y轴,所以执行“对准”操作后,工具坐标系Z轴与大地坐标系的Y轴平行。
2.操纵杆锁定
所在位置:主菜单-手动操纵-操纵杆锁定使用说明:用于限制操纵杆的有效方向。有无、水平方向、垂直方向、旋转四种设定。选择哪一个设定,相对应的方向将会失效。

当选择水平方向,则操纵杆水平运动失效,垂直方向和旋转有效。当斜向操作操纵杆会发现机器人会有动作,其实这是垂直方向的运动,不要理解错哦!其他设定理解方式一样,就不再赘述。
3.转到
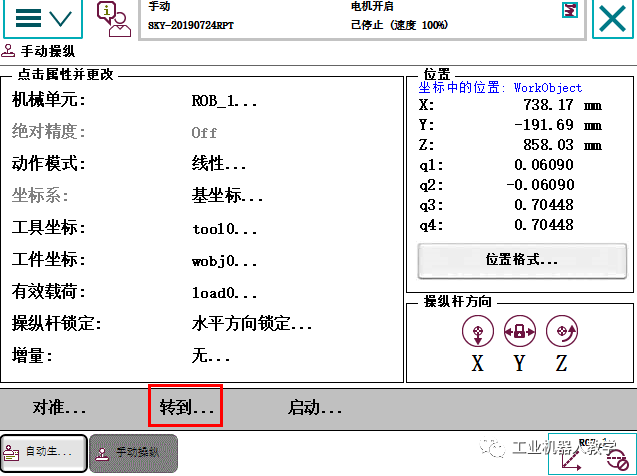
所在位置:主菜单-手动操纵-转到…使用说明:根据当前参考坐标系,快速移动机器人至指定位置。
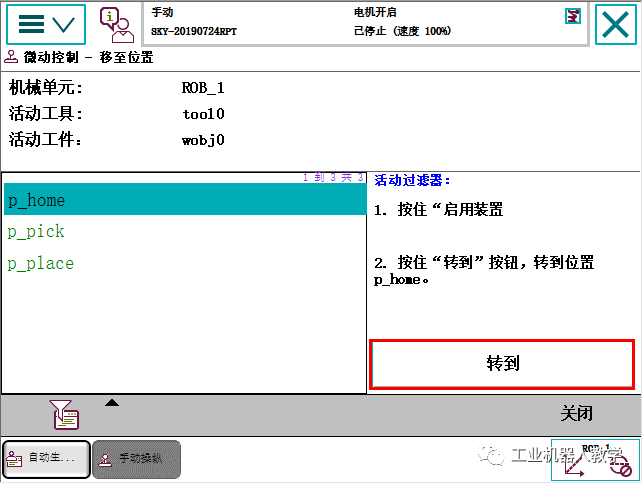
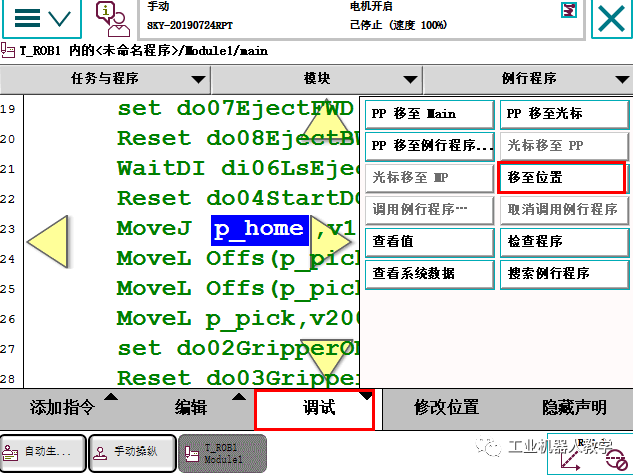
选中p_home点,点击上电后,长按转到按钮,则机器人会运动至参考工具坐标为tool0,参考工件为wobj0的p_home位置点。这与在程序编辑器中的“移至位置”功能一致。

以上内容了解了吗?想了解更多内容课,欢迎咨询我们。
更多资讯:智通教育(www.xue5156.com)致力于工业机器人培训、PLC培训、电工培训等行业课程,详情联系:0769-8707-8535。
 粤公网安备 44190002001278
粤公网安备 44190002001278





