嘿!快来跟我一起掌握ABB机器人固定工具的创建方法吧!
智通教育钟老师表示,大家在创建机器人的坐标时,可能没有关注坐标数据包函的各个参数。其实在坐标参数里有个参数是标明当前工具坐标是固定还是活动的。即:

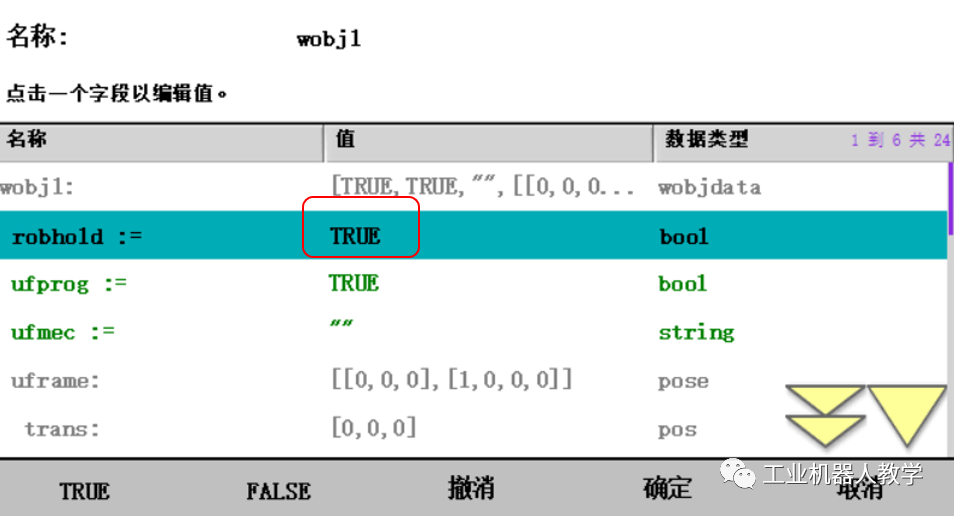
进入程序数据,查看工具工件数据详情,如下图所示↓↓↓
工具数据详细列表
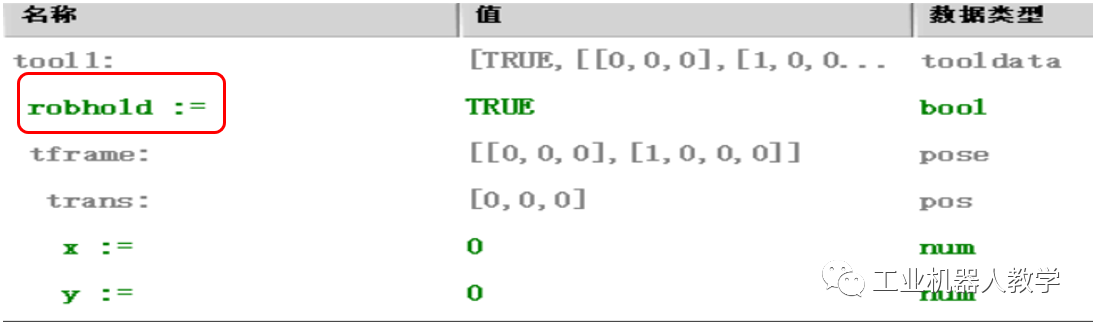
手册的说明是这样的:
Robhold 其数据类型为bool。用于定义机械臂是否夹持工具,当值为TRUE,表明机械臂正夹持着工具,即为活动工具。当值为FALSE,表明机械臂未夹持工具,即为固定工具。
工件数据详细列表
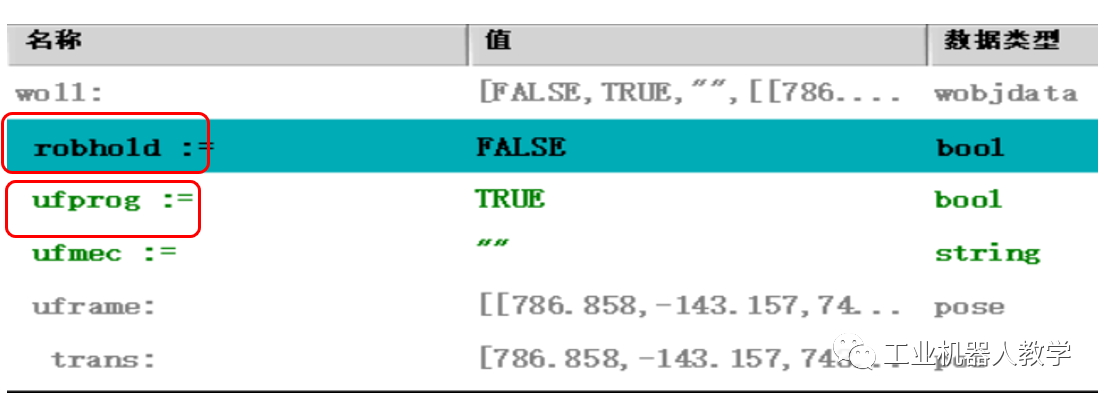
手册的说明是这样的:
Robhold 其数据类型为bool。用于规定实际程序任务中的机械臂是否正夹持着工件,当值为TRUE,表明械臂正夹持着工件,即使用一个固定工具。当值为FALSE,表明机械臂未夹持着工件,即机械臂正夹持着工具。
Ufprog(user frame programmed) 其数据类型为bool,表明当前坐标是否支持被其他机械装置驱动。即可否协同运动。
规定是否使用固定的用户坐标系:
TRUE:固定的用户坐标系。
FALSE:可移动的用户坐标系,即使用协调外轴。同时以半协调或同步协调模式用于MultiMove系统。
Ufmec(user frame mechanical unit) 其数据类型为string,表明用哪个机械单元来驱动当前工件坐标。即把机械单元的名称写在此处。
用于协调机械臂移动的机械单元。仅在可移动的用户坐标系中进行规定(ufprog为FALSE)。
规定系统参数中所定义的机械单元名称,例如,orbit_a。
固定工具的创建方法
从手册中可以看出,当工具坐标中Robhold 为TRUE时,表明当前机器人正夹持工具,即是活动的工具。机器人的运动中,两个坐标只能是一个固定一个活动,那么,对应的工件坐标只能是固定的了。所以,重点来了,我们要创建固定的工具坐标,那么必需要有一个活动的工件坐标。具体操作步骤如下:
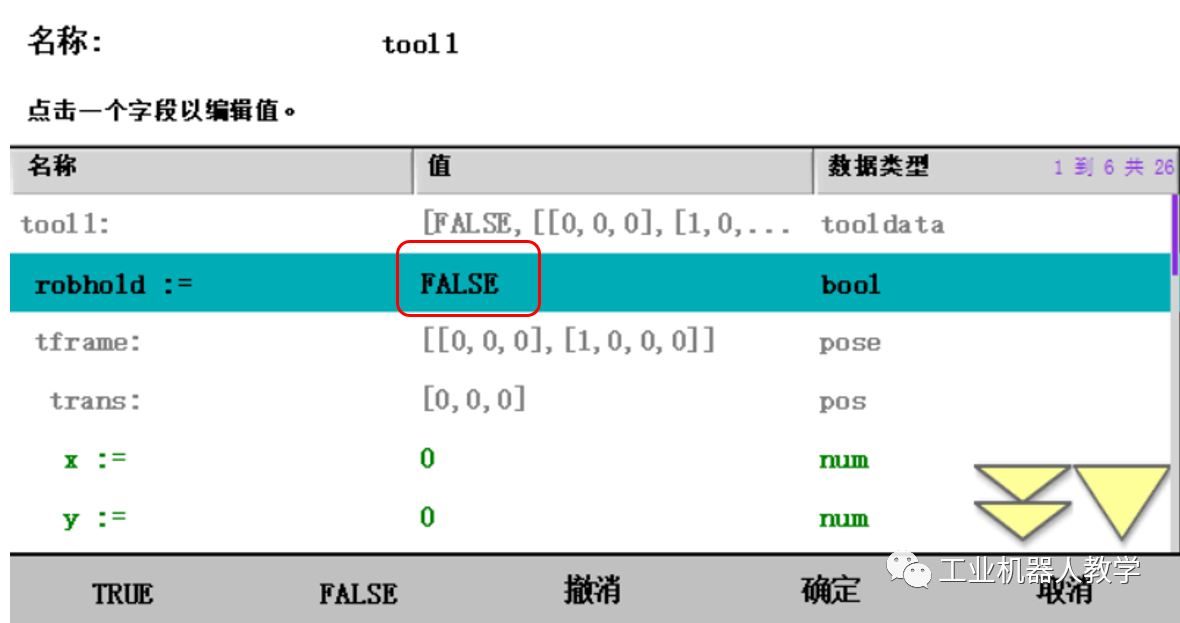
第一步,创建两个坐标,一个是固定的工具坐标(即参数Robhold 为FALSE),一个是活动的工件坐标(即参数Robhold 为TRUE)。
建一个工具坐标,Robhold 为FALSE。注意修改Mass值为正数。如下图:
会出现如下报错。先不确认,这是因为没有活动的工件坐标。
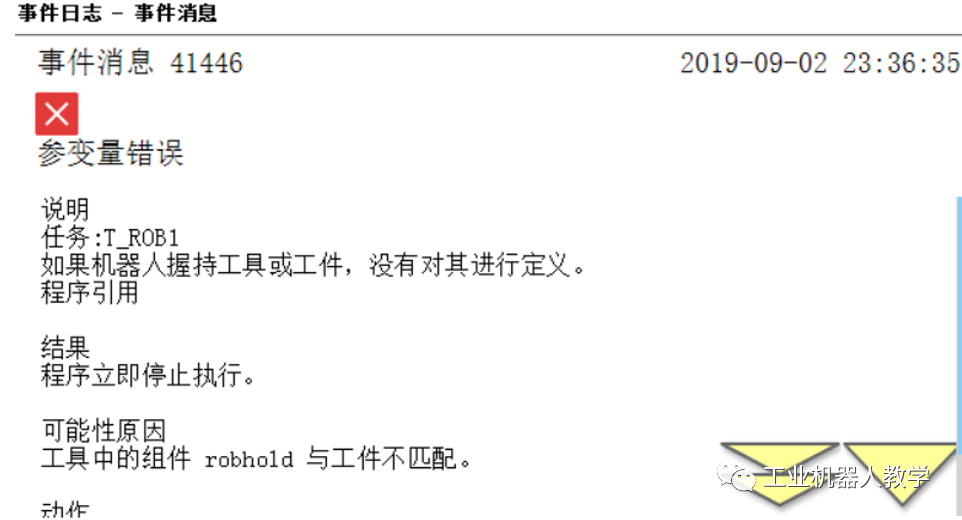
创建一个工件坐标,Robhold 为TRUE。如下图:
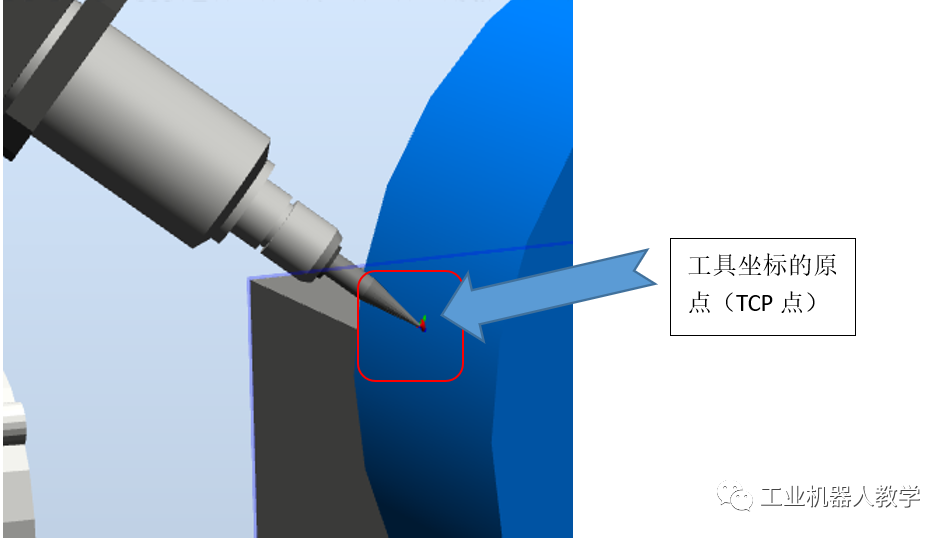
第二步,选择一个已知工具数据的工具坐标下,定义固定工具坐标的原点和方向。跟平时定义工具坐标方法一样。只不过此时工具坐标已是固定在选定的工具面或指定的工具点上。
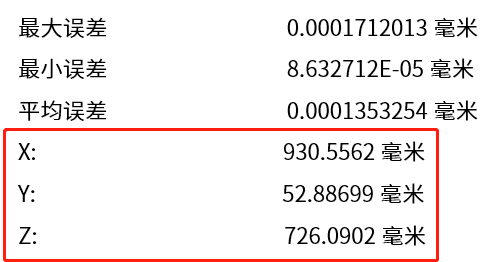
上图的X,Y,Z即是当前工具坐标在基坐标的位置。
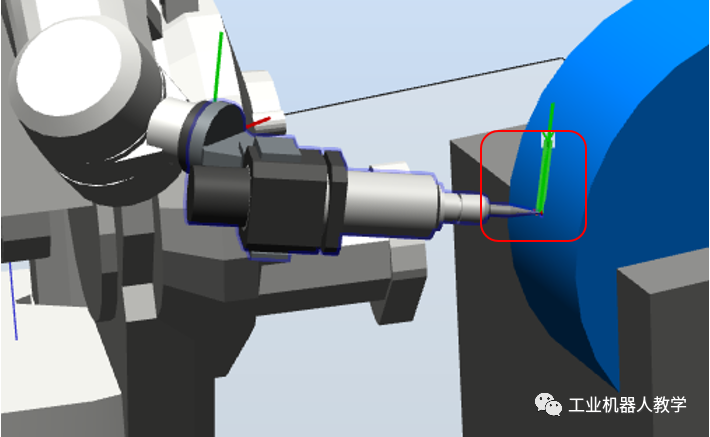
第三步,选择当前定的固定的工具坐标,选择对应活动的工件坐标。机器人设为重定位运动,体验机器人无论在哪个位置,都会沿所定工具坐标做重定运动的效果。快来试一下吧!
更多资讯:智通教育(www.xue5156.com)致力于工业机器人培训、PLC培训、电工培训等行业课程,详情联系:0769-8707-8088.
 粤公网安备 44190002001278
粤公网安备 44190002001278





