你知道和刘德华一起上春晚的机器人YUMI是怎么零点校准的吗?让工业机器人培训老师为您解答!
新年新气象!牛年大吉,牛气冲天。相信很多人都看了春节联欢晚会。大家还记得2021年春节联欢晚会上刘德华和ABB协作机器人YUMI闪亮登场给大家送福吗?现在东莞工业机器人培训辛老师下面就给大家分享一下ABB协作YUMI机器人的零点校准步骤。
ABB协作机器人YUMI所有轴的零点校完后姿态如下图。
- 为什么要进行零点校准? -
机器人培训辛老师表示,进行零点校正时,机器人各轴会移动到目标位置,这个位置称为机械零位或者叫原点;当机器人到达机械零位后,各轴当期的编码绝对位置就被保存下来;机械零位校正后,可以用直接坐标系移动机器人运行程序,同时机器人也知道软限位的位置。
- 零点校准的步骤 -
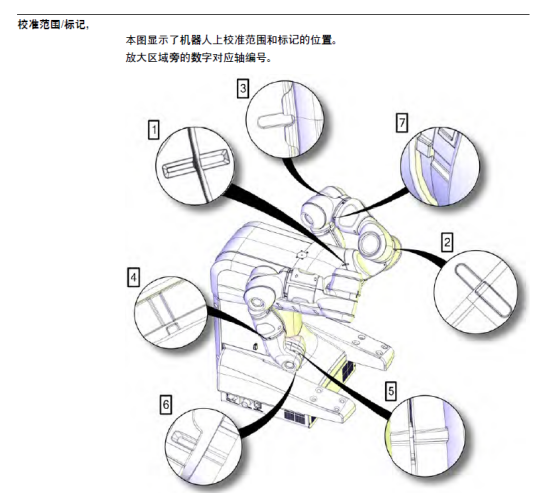
1.ABB协作机器人YUMI右手1轴原点位置如下图。

2. ABB协作机器人YUMI右手2轴原点位置如下图。

3. ABB协作机器人YUMI右手3轴原点位置如下图。

4.ABB协作机器人YUMI右手4轴原点位置如下图

5.ABB协作机器人YUMI右手5轴原点位置如下图

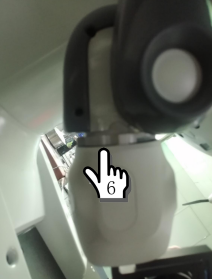
6ABB协作机器人YUMI右手6轴原点位置如下图
7.ABB协作机器人YUMI右手7轴原点位置如下图(注意右手R时必须对齐刻度线R,同理左手L时必须对齐刻度线L)。

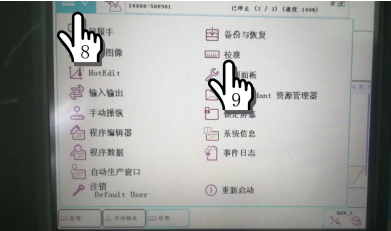
8.ABB主菜单——9.校准
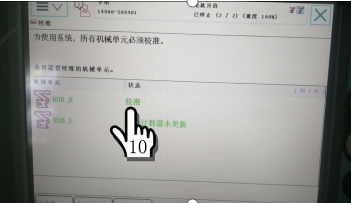
10.在这一定要选择对应的左右手进行转数器更新,前面校准的是右手,那就点击ROB_R(ABB协作机器人YUMI左右手区分和人的左右手一样,只要机器人右手7个轴都在原点位置 ,下图ROB_R还可以再更新一次。)
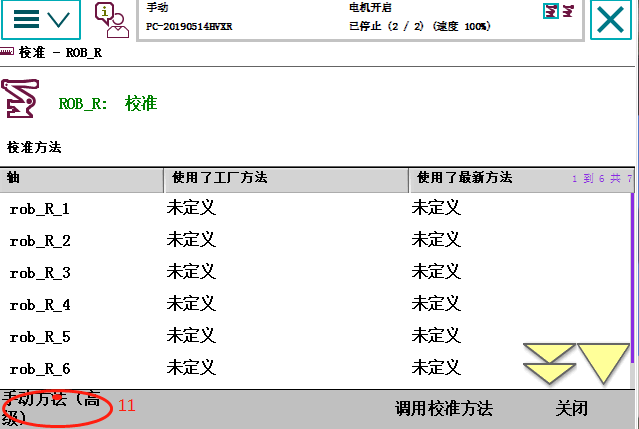
11.点击手动方法
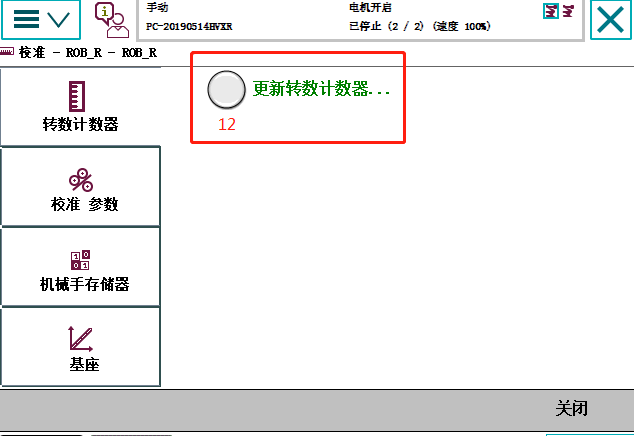
12.点击更新转数器
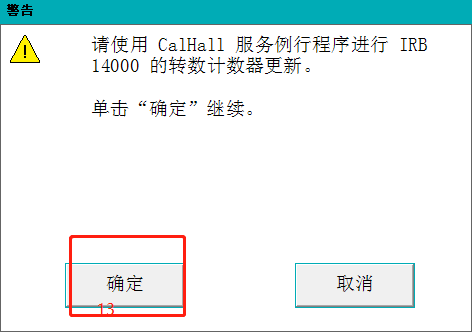
13.点击确定
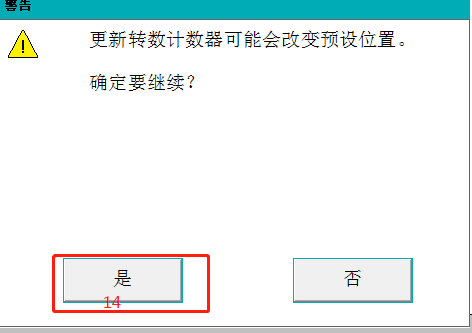
14.点击是
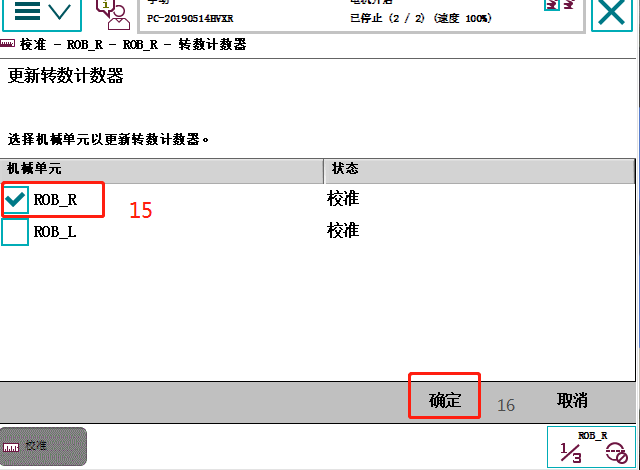
15.勾选ROB_R——16.点击确定
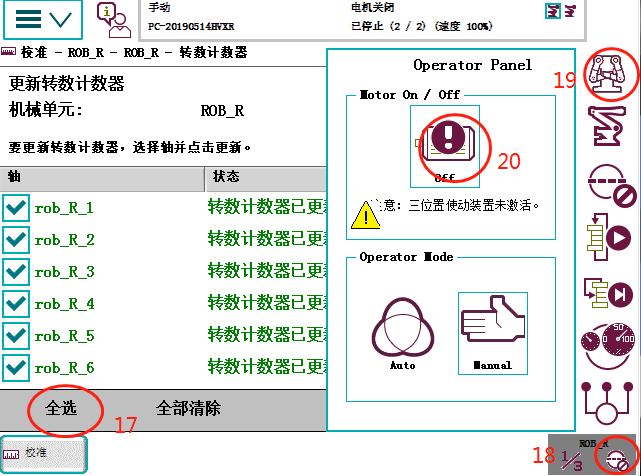
17.点击全选——18.点击示教器右下方ROB_R——19.点击协作机器人YUMI的图标——20.点击马达让电机关闭为off状态。(更新前机器人电机关闭状态)。
21.点击更新。
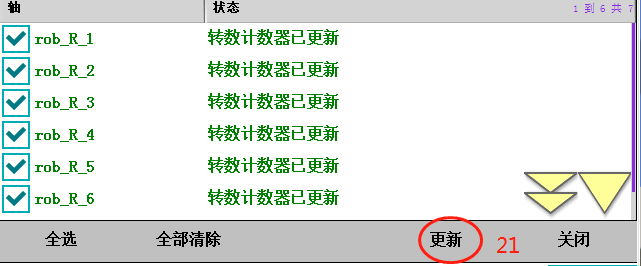
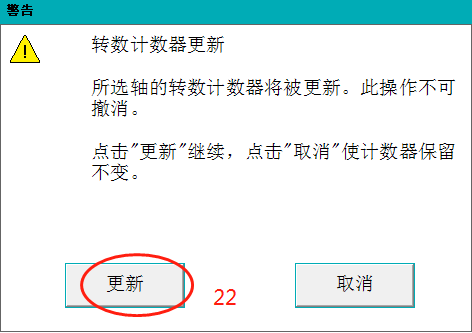
22.点击更新
ABB协作机器人YUMI左手和右手的方法一样,在这不在赘述。
更多资讯:智通教育(www.xue5156.com)致力于工业机器人培训、PLC培训、电工培训等行业课程,详情联系:0769-8707-8535.
 粤公网安备 44190002001278
粤公网安备 44190002001278





