KUKA机器人培训专家偷偷告诉你用赋值偏移指令一点画圆和方的秘密!
很多读者经常问KUKA机器人有没有和ABB机器人功能指令类似的offs偏移指令?答案是肯定可以实现的。接下来东莞KUKA机器人培训辛老师给大家分享如何用赋值偏移指令一点画圆和方的秘密。
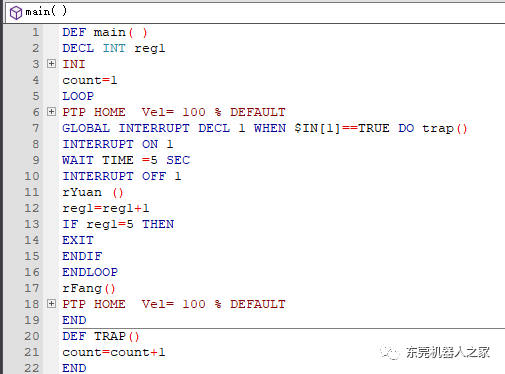
DEF main( )
DECL INT reg1
INI
count=1
LOOP
PTP HOME Vel= 100 % DEFAULT
GLOBAL INTERRUPT DECL 1 WHEN $IN[1]==TRUE DO trap()
INTERRUPT ON 1
WAIT TIME =5 SEC
INTERRUPT OFF 1
rYuan ()
reg1=reg1+1
IF reg1=5 THEN
EXIT
ENDIF
ENDLOOP
rFang()
PTP HOME Vel= 100 % DEFAULT
END
_______________________________________________________________
DEF TRAP()
count=count+1
END
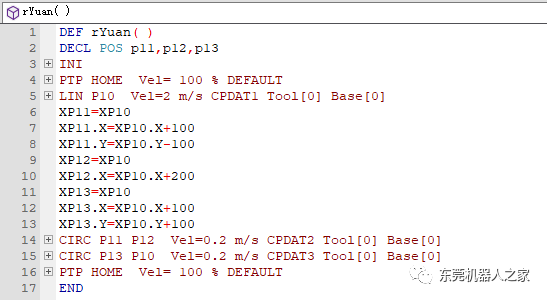
DEF rYuan( )
DECL POS p11,p12,p13
INI
PTP HOME Vel= 100 % DEFAULT
LIN P10 Vel=0.2 m/s CPDAT2 Tool[0] Base[0]
XP11=XP10
XP11.X=XP10.X+100
XP11.Y=XP10.Y-100
XP12=XP10
XP12.X=XP10.X+200
XP13=XP10
XP13.X=XP10.X+100
XP13.Y=XP10.Y+100
CIRC P11 P12 Vel=0.2 m/s CPDAT2 Tool[0] Base[0]
CIRC P13 P10 Vel=0.2 m/s CPDAT2 Tool[0] Base[0]
PTP HOME Vel= 100 % DEFAULT
END
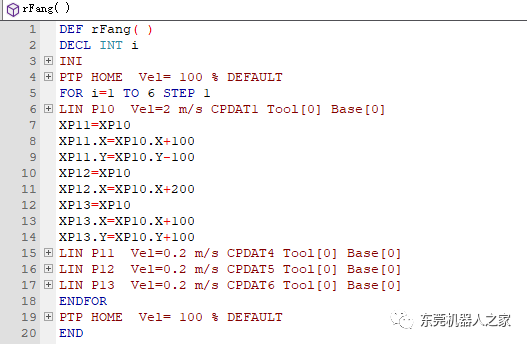
DEF rFang( )
DECL INT i
PTP HOME Vel= 100 % DEFAULT
FOR i=1 TO 6 STEP 1
LIN P10 Vel=2 m/s CPDAT1 Tool[0] Base[0]
XP11=XP10
XP11.X=XP10.X+100
XP11.Y=XP10.Y-100
XP12=XP10
XP12.X=XP10.X+200
XP13=XP10
XP13.X=XP10.X+100
XP13.Y=XP10.Y+100
LIN P11 Vel=0.2 m/s CPDAT4 Tool[0] Base[0]
LIN P12 Vel=0.2 m/s CPDAT5 Tool[0] Base[0]
LIN P13 Vel=0.2 m/s CPDAT5 Tool[0] Base[0]
ENDFOR
PTP HOME Vel= 100 % DEFAULT
END
大家在首次编写的过程中难免会遇到各种问题,详情联系:0769-8707-8535.
 粤公网安备 44190002001278
粤公网安备 44190002001278





