让我们跟着工业机器人培训专家一起来了解使用标识符命名指令目标位置的方法吧
时间:2021-04-16 16:11
来源:
如何使用标识符命名指令目标位置?跟着工业机器人培训专家来了解吧!
运动指令目标点位除可以用*表示,也可以使用标识符来命名,例如:
MoveAbsJ jpos10, v1000, z50, tool0;
使用标识符来命名指令目标位置,可增强程序的可读性,也更便于后续的修改调试。
来自东莞自动化培训专家的一则小贴士:
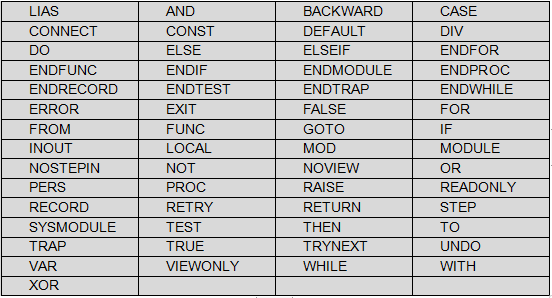
RAPID语言中标识符用于为对象命名。标识符最大32字符,不可占用保留字,必须以字母打头,不区分大小写,不可占用系统保留字。系统保留字,是指表4-1中的字符。
表4-1
使用标识符命名指令目标位置的操作步骤如下:1双击*—2单击【新建】—3单击“名称:”后的【...】—4输入名称—5单击【确定】—6单击【确定】—7单击【确定】。详细操作图示,如图4-37~图4-42所示:

图4-37

图4-38

图4-39

图4-40

图4-41
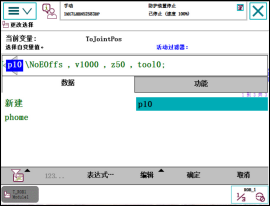
图4-42
运动指令目标点位除可以用*表示,也可以使用标识符来命名,例如:
MoveAbsJ jpos10, v1000, z50, tool0;
使用标识符来命名指令目标位置,可增强程序的可读性,也更便于后续的修改调试。
来自东莞自动化培训专家的一则小贴士:
RAPID语言中标识符用于为对象命名。标识符最大32字符,不可占用保留字,必须以字母打头,不区分大小写,不可占用系统保留字。系统保留字,是指表4-1中的字符。
表4-1
使用标识符命名指令目标位置的操作步骤如下:1双击*—2单击【新建】—3单击“名称:”后的【...】—4输入名称—5单击【确定】—6单击【确定】—7单击【确定】。详细操作图示,如图4-37~图4-42所示:
图4-37
图4-38
图4-39
图4-40
图4-41
图4-42
 粤公网安备 44190002001278
粤公网安备 44190002001278





