智通自动化专家给你带来RobotStudio软件模型创建与特征点捕捉
时间:2021-04-22 16:57
来源:
RobotStudio软件模型创建与特征点捕捉
在以往文章中,在东莞工业机器人培训专家的带领下我们已经学习了如何在Robotstudio软件中创建一个简单的工作站以及如何对虚拟工作站中的机器人进行手动操纵。本小节我们将学习,如何在RobotStudio软件中创建简单的几何模型,以及如何对模型的特征点进行捕捉。1. 在Robotstudio软件中创建简单几何模型
Robotstudio软件具备创建简单3D模型的功能,可以用简单的3D模型对机器人工作站中的周边设备进行布局模拟。如果需要对周边设备进行精细模拟的话,则需要通过SoildWorks、ProE等第三方3D设计软件对周边设备进行建模,然后以*.sat格式导入到Robotstudio中。
Robotstudio中能够创建的简单3D几何模型包括:矩形体、圆锥体、圆柱体、球体、锥体等。接下来以在大地坐标系下创建一个模型原点位于(0,300,0)坐标处、底面半径为100、高度为200的圆柱体为例,演示如何在RobotStudio中创建简单几何模型。
操作步骤如下:1单击【建模】选项卡—2单击【固体】—3单击【圆柱体】—4输入基座中心点坐标值X,Y,Z—5输入底面半径—6输入高度—7单击【创建】。具体的操作步骤
图示见图4-85~图4-86:
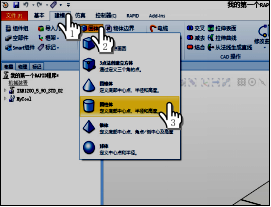
图4-85

图4-86
图4-86中“基座中心点”指示出圆柱体的原点位于底面中心位置,下面的三个输入框分别是用于设定模型原点位于所选参考坐标系中的X,Y,Z坐标值。“方向(deg)”下的三个输入框是用于设定模型绕参考坐标系X,Y,Z轴旋转的角度。“半径”、“直径”、“高度”下的输入框用于设定模型的对应尺寸参数。创建其他形状的几何模型的方法与创建圆柱体的操作步骤相似,不再赘述。
2.捕捉简单几何模型的特征点
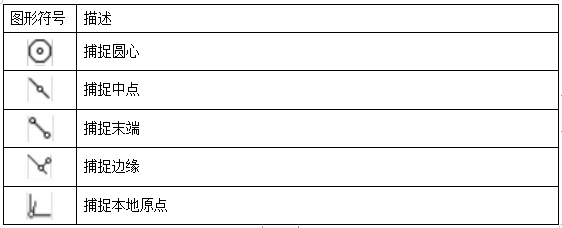
通过特征点捕捉功能,可以快速的将机器人的TCP移动到几何模型的特征点上。可以捕捉的特征点类型包括:末端、中点、中心、边沿上的点、本地原点等。表4-2展示了各类特征点的图形符号:
表4-2
下面智通自动化培训老师将机器人的TCP快速移动至圆柱体的顶面圆心为例,演示如何利用特征点捕捉功能快速地将机器人TCP移动至模型的特征点。操作步骤如下:
1单击【基本】选项卡—2选择正确的工具—3单击机器人本体—4单击手动线性图标—5单击捕捉圆心—6鼠标指针移至TCP上显示红绿蓝箭头交点处,拖动鼠标,将TCP往圆柱体顶面圆心方向拖动,当TCP靠近圆心时,TCP将自动跳向圆心。具体操作步骤图示见图4-87~图4-89:
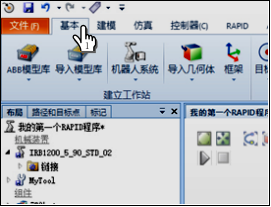
图4-87
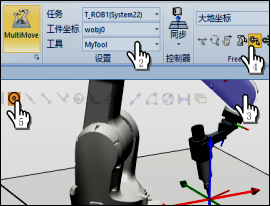
图4-88
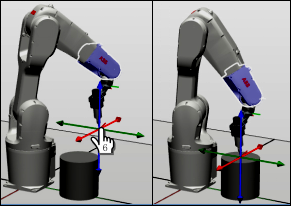
图4-89
 粤公网安备 44190002001278
粤公网安备 44190002001278





