如何创建和定义一个Tooldata数据?你知道吗
时间:2021-04-27 16:11
来源:
Tooldata数据的创建与设定
本节智通自动化培训专家将介绍如何创建和定义一个Tooldata数据,用于描述工具的工具坐标系和工具负载的物理特征。我们以创建一个名为Newtool的工件数据来描述图5-20所示的工具坐标系和负载特征,演示如何通过创建工具数据来定义工具坐标系。创建tooldata数据并用直接输入法定义工具特征的操作步骤是:1单击【ABB菜单】—2单击【手动操纵】—3单击【工具坐标系】—4单击【新建】—5输入名称“Newtool”—6单击【确定】—7选中“Newtool”—8单击【编辑】—9单击【更改值】—10在对应项上填入图5-20中所示的值—11单击【确定】。详细的操作图示见图5-21~图5-27。
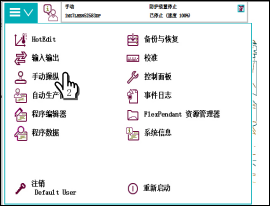
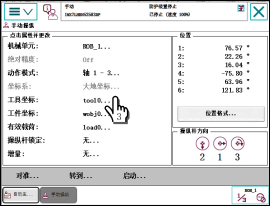
图5-21 图5-22 图5-23
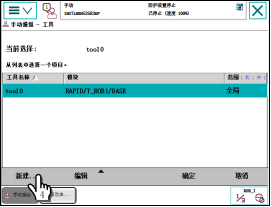
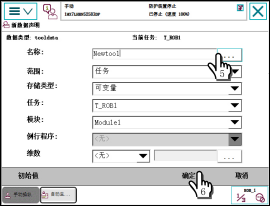
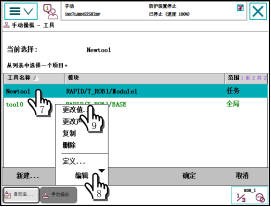
图5-24 图5-25 图5-26
|
|
|
|
|

|
工业机器人培训专家温馨提醒:工件的重量mass一项的值必须大于零,否则控制系统会发出如图5-28所示的错误警告;工件的重心cog.x、cog.y、cog.z三项的值不能同时为零,否则在运行使用该工具坐标系的运动指令语句时机器人系统会报如图5-29所示的错误。
图5-28 图5-29
对于多点法定义工具坐标系位置,所使用的点数越多则精度越高,当然操作过程所需花费的时间也就越长。确定工具坐标系姿态可以选择的方法有:
(1)“TCP(默认方向)” 即与tool0中工具坐标系的姿态相同,工具坐标系Z轴垂于机器人6轴法兰平面,指向法兰外侧;
(2)“TCP和Z” 即通过指定一个点作为工具坐标系Z轴负半轴上的点来确定工具坐标系的Z轴方向,工具坐标系其他轴的方向由系统确定;
(3)“TCP”和Z,X 即通过指定两个分别点作为工具坐标系Z轴负半轴上的点和X轴负半轴上的点,来确定工具坐标系的Z轴方向和X轴方向,此时工具坐标系的Y轴方向也是确定的了,无需再指定,可以通过“右手法则”指示出工具坐标系Y轴的方向。
 粤公网安备 44190002001278
粤公网安备 44190002001278





