工业机器人培训专家为您演示工具坐标系的操作步骤
时间:2021-04-27 16:37
来源:
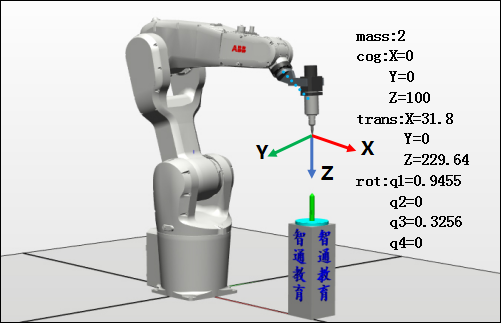
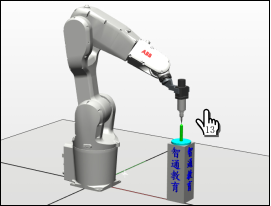
图5-20
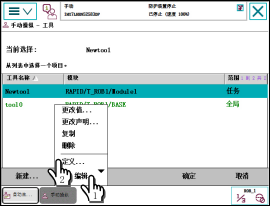
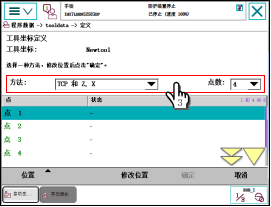
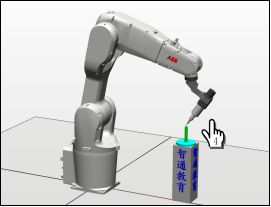
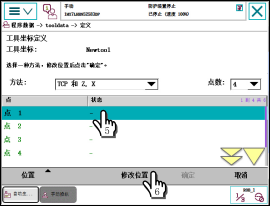
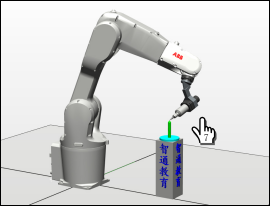
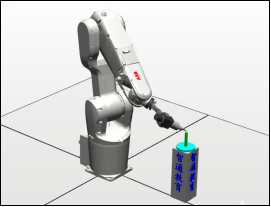
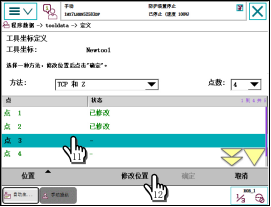
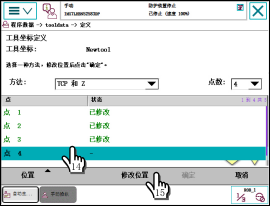
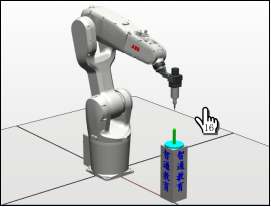
下面自动化培训专家以选用“TCP和Z,4点法”为例,演示定义图5-20所示的工具坐标系的操作步骤:1单击【编辑】—2单击【定义】—3选择“TCP和Z”、“点数:4”—4将机器人以任意姿态一将TCP逼近锥尖点—5单击【点1】—6单击【修改位置】—7将机器人以任意姿态二将TCP逼近锥尖点—8单击【点2】—9单击【修改位置】—10将机器人以任意姿态三将TCP逼近锥尖点—11单击【点3】—12单击【修改位置】—13将机器人以预期的工具坐标系Z轴线平行与基坐标Z轴线的姿态将TCP逼近锥尖点—14单击【点4】—15单击【修改位置】—16保持机器人当前姿态,垂直移动TCP到锥尖点正上方—17单击【延伸点Z】—18单击【修改位置】—19单击【确定】。详细的操作图示见图5-30~5-41。
5-30 5-31 5-32

5-33 5-34 5-35
5-36 5-37 5-38

5-39 5-40 5-41
 粤公网安备 44190002001278
粤公网安备 44190002001278





