你知道什么情况下机器人需要进行校准吗?机器人又要怎么校准呢?
时间:2021-06-20 17:25
来源:

在使用IRB360并联机器人进行分拣工作时,在开始安装调试阶段,对机器人进行校准,安装工具并创建机器人工具坐标系,根据实际的产品创建有效载荷数据,再根据机器人和输送链协同工作经中常使用DSQC377B输送链跟踪板,还需要创建IO板和其他IO信号等。
什么情况下机器人需要进行校准
工业机器人培训专家表示,ABB机器人本体上有一块串行测量板SMB,其主要作用是从机器人各轴伺服电机处收集转数计数器数据,并记录保存。该数据用于测量每个轴的速度和位置,及编码器等数据。当机器人正常通电是时,转数计数器器的数据由机器人主电源供电保持,当机器人断电后,其数据有SMB电池供电保持保存。如果转数计数器不正确,将会导致机器人定位不准确,点位数据不准确等。

东莞工业机器人专家表示: 在以下情况下,需要对机器人进行转数计数器更新操作:
1.SMB电池电量耗尽,没次开机后都提示转数计数器数据错误;
2.更换SMB电池后;
3.当转数计数器发送故障,修复后;
4.转数计数器与测量板之间断开过以后
5.断电后,机器人关节轴发送了移动;
6.系统报警提示“10036转数计数器未更新”时;
7.在首次安装中,连接机器人与控制器之后,必须更新转数计数器。
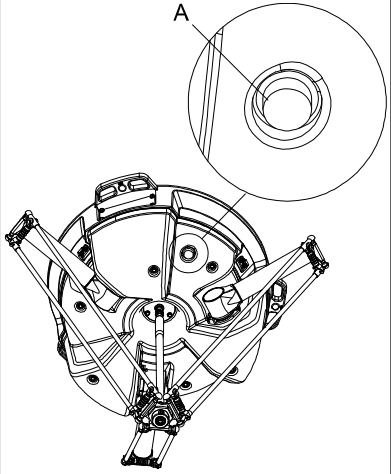
IRB30机器人手动刹车按钮
ABB的IRB360机器人手动刹车按钮:A按钮。当对机器人进行校准时候,需要单独对1-4轴进行校准,可以按下刹车按钮,单独把各轴移动至校准位置,在示教器上面对各轴进行一个一个校准。
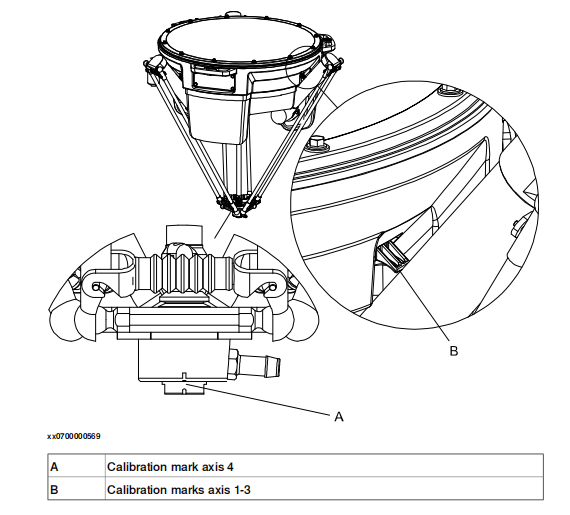
IRB30机器人各轴校准位置
ABB的IRB360机器人各轴校准位置,校准可从1-4轴依次进行,但无固定先后校准顺序。
 粤公网安备 44190002001278
粤公网安备 44190002001278





