ABB的IRB360机器人的工具坐标系什么意思?
时间:2021-06-20 17:55
来源:
IRB30机器人校准示教器画面
IRB30机器人校准操作演示
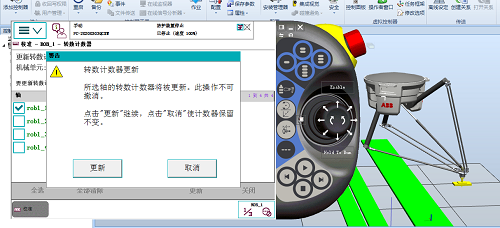
ABB的IRB360机器人各轴校准操作演示,具体见操作过程。
想了解更多东莞工业机器人培训资讯?智通教育20年致力于东莞工业机器人培训、PLC培训、电工培训等培训项目,详情联系:0769-8707-8535.
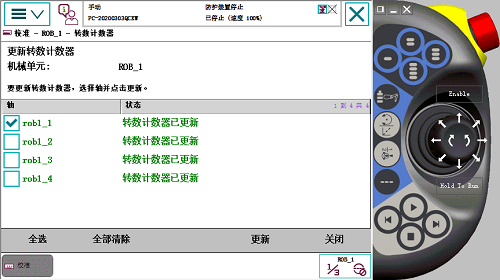
ABB的IRB360机器人各轴校准都在示教器上面进行,如下图示教器校准画面。
IRB30机器人校准操作演示
ABB的IRB360机器人各轴校准操作演示,具体见操作过程。
IRB360机器人工具
机器人工具坐标系
什么是工具坐标系?工业机器人培训专家解释说:工具坐标系就是机器人到达预设目标时所使用工具的位置。工具是机器人工作时候所使用的工具,机器人可以安装不同的工具,或者工具上面同时有多个夹具工具等。机器人工作必须要精确到达某个位置,这时候就需要在机器人所安装工具上面定一个参照质点和方向,这样机器人不管什么运动到达哪里,就以工具的这个质点所经过的轨迹作为参照标准,这样就可以精确控制机器人的工作路径和精确到达某个位置。
工具数据 tooldata用于描述定义安装在机器人末端轴上的工具的TCP(Tool Center Point工具中心位置)、质量、重心等参数数据。一般不同的机器人应用配置不同的工具,如说弧焊的机器人就使用弧焊枪作为工具,TCP便设置在焊枪枪口处,而用于搬运板材的机器人就会使用吸盘式的夹具作为工具 TCP一般设置在吸盘板中心,夹具时可以设定TCP在夹具加紧产品中心。
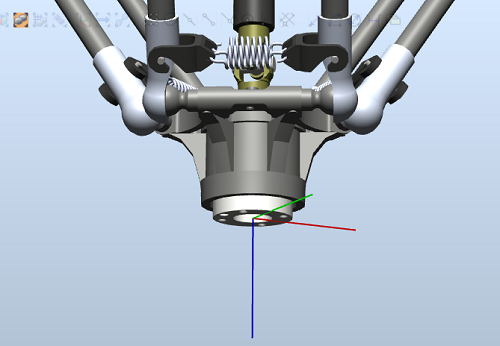
ABB机器人在手腕处都有一个预定义工具坐标系,该坐标系被称为tool0。用户自定义的工具坐标数据是根据 tool0的偏移位置所得出的位置数据。一般TCP点就是运动参照点。
IRB360机器人工具坐标
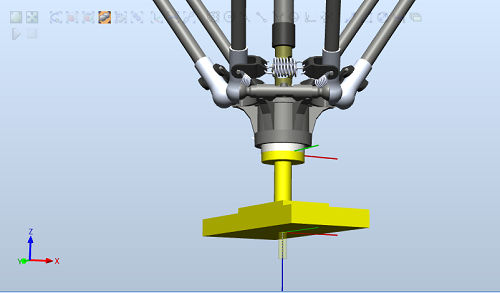
ABB机器人安装工具到末端轴法兰上以后,需要建立新的工具坐标系,新的工具坐标系的工具原点和工具方向都是以六轴默认tool0为参照而建立的,所以新建立的工具坐标系的数据都是相对于tool0的偏移量。即新的工具坐标系原点和放方向将由tool0转移到所需要的新工具上面。
智通工业机器人培训专家解释说:ABB公司IRB360机器人的工具和6轴机器人一致,安装在4轴或者3轴末端轴上,创建工具坐标系理论上和6轴机器人一致,但由于并联机器人绕坐标系X轴、Y轴做旋转运动比较困难,所以一般使用直接输入法。
 粤公网安备 44190002001278
粤公网安备 44190002001278





