为什么两条MoveL指令语句,同速度、同距离,时间却不同?
从本篇文章开始,智通机器人培训黄老师就带大家来深入聊一聊一些经常用到的数据类型。
首先我们一起来看,以下一条指令语句:
MoveL p10, v1000, z50, tool0;
有读者会不以为意,这是一条非常简单的指令语句,即使是ABB机器人初学者也能看懂,有什么好看的呢?但以黄老师多年的工业机器人教学经验来看,很多人其实是没有能够透彻理解这样一条简单的指令语句的。不相信的话,不妨让我们尝试以下回答以下几个问题:
(1)为什么两条MoveL指令语句,使用相同的速度数据,走同样距离的轨迹,所花的时间却不相同呢?

(2)为什么在MoveL指令语句之的setdo指令在手动单步调试运行时能够在准确的时机输出DO信号,而在自动模式运行时却不能在准确的时机执行呢?

(3)为什么有的时候执行MoveL指令,会提示“轴配置错误”,轴配置是什么意思呢?

(4)为什么在【程序数据】页面里对P10进行了【修改位置操作】,执行指令语句时机器人却无法运动到示教的目标位置呢?
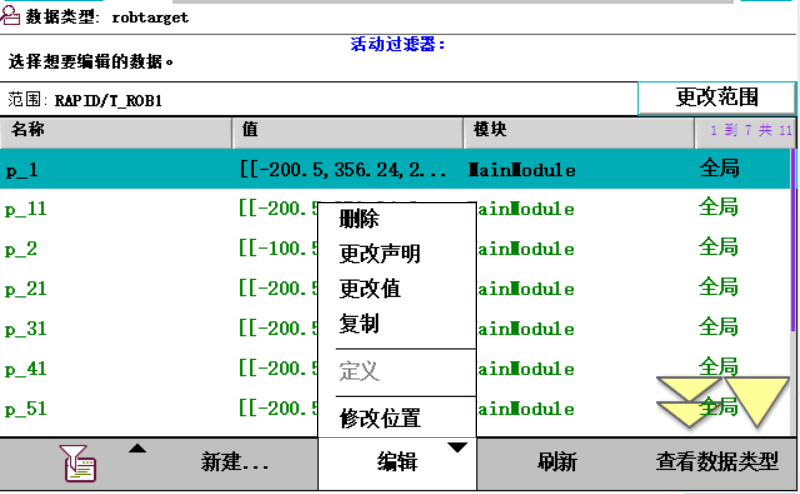
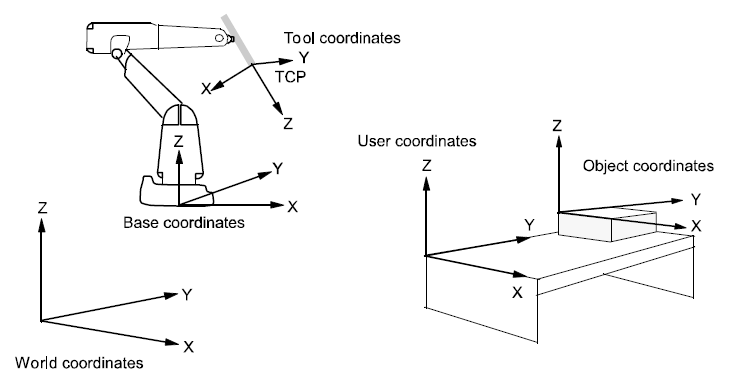
(5)位置数据P10是以坐标值的形式来描述目标位置的,那它是以什么坐标系为参考坐标系的呢?
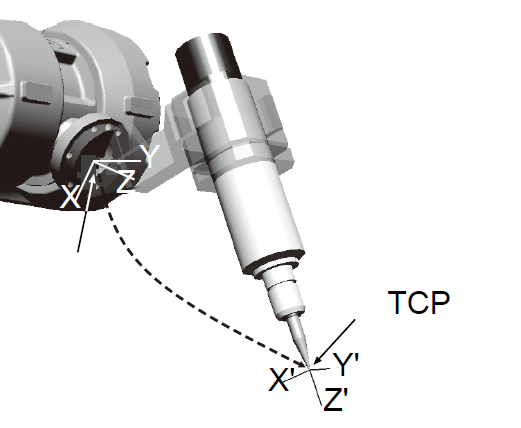
(6)指令语句中的tool0起到什么作用呢?
在以上MoveL指令语句中用到的数据类型有:位置数据robtarget(p10)、速度数据speeddata(V1000)、区域数据znoe(z50)、工具数据tooldata(tool0)以及隐含的工件数据(wobj0)。
更多资讯:智通教育(www.xue5156.com)致力于工业机器人培训、PLC培训、电工培训等行业课程,详情联系:0769-8707-8535.
 粤公网安备 44190002001278
粤公网安备 44190002001278





