不了解工业机器人结构组成?东莞自动化培训专家为您详解!
东莞工业机器人(培训)是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
工业机器人由本体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制,如图1-12。
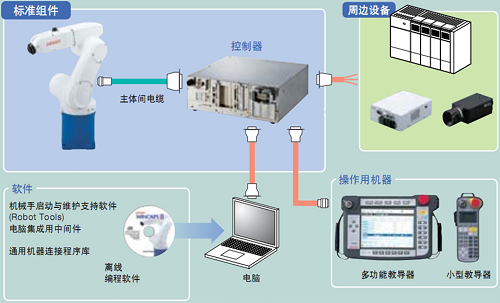
图1-12
机器人本体又称操作机,它是用来完成各种操作的执行部件,结构主要有感知系统、控制系统、驱动装置、传动装置、执行机构,详细结构形式可以查看图1-13。
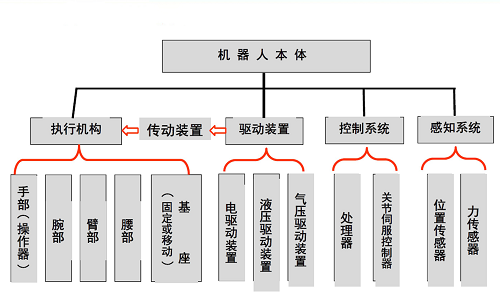
图1-13
(1)机器人驱动装置 要使机器人运行起来, 需给各个关节即每个运动自由度安置传动装置,通过驱动系统给机器人各部位、各关节动作提供原动力。
驱动系统可以是液压传动、气动传动、电动传动,或者把它们结合起来应用的综合系统; 可以是直接驱动,或者是通过同步带、链条、轮系、谐波齿轮等机械传动机构进行间接驱动。
1)电动驱动装置的能源简单,速度变化范围大,效率高,速度和位置精度都很高,如图1-14。
|
|
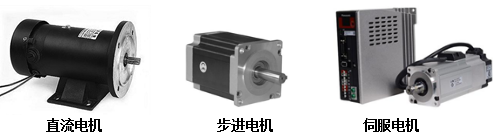
图1-14
但它们多与减速装置相联,直接驱动比较困难。驱动装置又可分为直流(DC)、交流(AC)伺服电机驱动和步进电机驱动。直流伺服电机电刷易磨损,且易形成火花。无刷直流电机也得到了越来越广泛的应用。步进电机驱动多为开环控制,控制简单但功率不大,多用于低精度小功率机器人系统。
2)液压驱动通过高精度的缸体和活塞来完成,通过缸体和活塞杆的相对运动实现直线运动。其的优点是功率大,精度较高,结构紧凑。但由于需要增设液压源,容易产生液体泄漏,不适合高、低温场合,故液压驱动目前多用于特大功率的机器人系统。
3)气压驱动的结构简单,清洁,动作灵敏,具有缓冲作用。但与液压驱动装置相比,功率较小,刚度差,噪音大,速度不易控制,所以多用于精度不高的点位控制机器人。
(2)传动装置 传动装置是连接动力源和运动连杆的关键部分,根据关节形式,又分为直线传动和旋转传动机构,如图1-15。
1)直线传动机构的直线运动特性多用于直角坐标机器人的X、Y、Z方向驱动,圆柱坐标结构的径向驱动和垂直升降驱动,以及球坐标结构的径向伸缩驱动。
2)旋转传动机构采用旋转传动机构的目的是将电机的驱动源输出的较高转速转换成较低转速,并获得较大的力矩。机器人中应用较多的旋转传动机构有齿轮链、同步皮带和谐波齿轮。
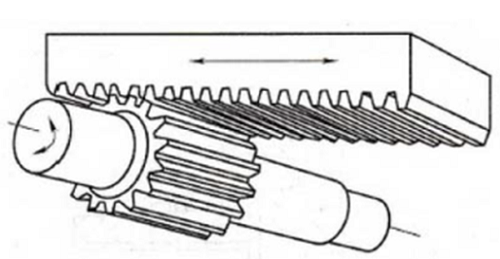
图1-15-(a) 直线传动
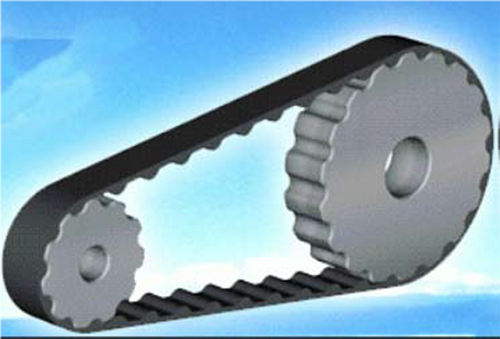
图1-15-(b) 旋转传动
(3)感知系统 机器人传感系统的感受系统由内部传感器模块和外部传感器模块组成, 用以获取内部和外部环境状态中有意义的信息。
1)(东莞工业)机器人(培训)位置检测常见的方法有旋转光学编码器、感应同步器、电位计、转速计等。
旋转光学编码器是最常用的位置反馈装置。光电探测器把光脉冲转化成二进制波形。轴的转角通过计算脉冲数得到,转动方向由两个方波信号的相对相位决定。感应同步器输出两个模拟信号——轴转角的正弦信号和余弦信号。轴的转角由这两个信号的相对幅值计算得到。感应同步器一般比编码器可靠,但它的分辨率较低。电位计是最直接的位置检测形式。它连接在电桥中,能够产生与轴转角成正比的电压信号。但是,由于分辨率低、线性不好以及对噪声敏感。转速计能够输出与轴的转速成正比的模拟信号。如果没有这样的速度传感器,可以通过对检测到的位置相对于时间的差分得到速度反馈信号。
2)机器人力检测的力传感器通常安装在操作臂的关机驱动器、末端执行器与操作臂的终端关节之间、末端执行器的“指尖”上。安装在关节驱动器上可测量驱动器/减速器自身的力矩或者力的输出。但不能很好地检测末端执行器与环境之间的接触力。安装在末端执行器与操作臂的终端关节之间,可称腕力传感器。通常,可以测量施加于末端执行器上的三个到六个力/力矩分量。安装在末端执行器的“指尖”上。通常,这些带有力觉得手指内置了应变计,可以测量作用在指尖上的一个到四个分力。
(4)机器人的控制系统 是机器人的重要组成部分,用于对机器人动作的控制,以完成特定的工作任务。驱动系统就是机器人的动力源。无论是使用还是制造工业机器人,都要对控制系统和驱动系统有所了解,如图1-16。
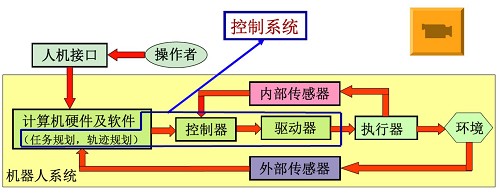
图1-16
(5)工业机器人的控制柜介 ABB机器人的控制系统称为IRC5系统,IRC5包含以下部件:主电源、计算机供电单元、计算机控制模块(计算机主体)、输入/输出板、Customer connections(用户连接端口)、FlexPendant接口(示教盒接线端)、轴计算机板、驱动单元(机器人本体、外部轴),如图1-17。
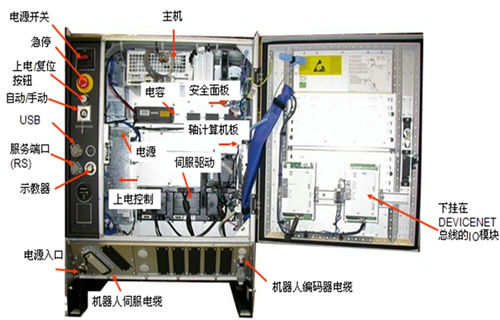
图1-17
更多资讯:智通教育(www.xue5156.com)致力于工业机器人培训、PLC培训、电工培训等行业课程,详情联系:0769-8707-8535.
 粤公网安备 44190002001278
粤公网安备 44190002001278





