IRB1200的搬运是怎么做的?让东莞自动化培训专家为您解答!
东莞工业机器人培训老师表示,要安装机器人,首先要对安装地点进行全面考察,包括布局、地面状况、供电情况等基本情况,还需要认真阅读机器人的随机文档,了解机器人本体的最大运动空间,以及安装工具时的运动范围,从而确定机器人的具体安装位置。根据实际情况,机器人可以安装在地面、墙面以及工作台上。
1. IRB1200的搬运
机器人整箱搬运可以使用叉车或起重机,底板是包装箱承重部分,与内包装物之间有固定,内包装物不会在底板上窜动,是起重机或叉车搬运的受力部分。箱体外壳及上盖只起防护作用,承重有限,包装箱上不能放重物,不能倾倒,不能雨淋等,如图2-9。
图2-9
机器人本体搬运,需要先用扳手拆掉将机器人固定在底座上的四个螺丝,如图2-10,机器人出厂时都会把机器人本体调至适合搬运的姿态,并且用支架进行固定,还没有搬运至正确位置之前,支架不要拆除,如图2-11。

图2-10

图2-11
用圆形吊带吊升机器人所需设备包含:高架起重机、圆形吊带、吊升工具集(支架、连接螺钉、垫圈),需要注意的是,在机器人表面与圆形吊带直接接触的地方,需要垫放厚布,如图2-12。
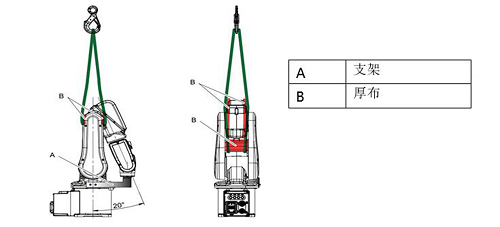
图2-12
控制柜的搬运,标准型控制柜一般有吊环,可以使用起重机搬运或叉车搬运。紧凑型控制柜因为比较小,可以人力搬运。
来自智通工业机器人培训老师的小贴士:
在没有固定机器人底座之前,不要更改机器人本体的姿态,这样会导致机器人本体重心改变,容易发生倾斜。
 粤公网安备 44190002001278
粤公网安备 44190002001278





