东莞自动化培训专家为你解析MoveC指令
时间:2021-04-21 17:37
来源:
MoveC指令,中文名称作圆弧运动指令。工业机器人培训老师表示,MoveC指令可通过已知的三点确定一段圆弧轨迹。已知三点是指:圆弧的起点、圆弧上的点、圆弧的终点。圆弧的起点是前一条运动指令的停止点,圆弧上的点和圆弧的终点由圆弧运动指令来指定。如果圆弧起点和圆弧终点的TCP姿态相同,则在圆弧运动期间,TCP姿态保持不变。如果圆弧起点和圆弧终点的TCP姿态不同,那么在执行圆弧指令期间,沿路径调整姿态的准确性仅取决于圆弧起点和圆弧终点处的姿态,运动过程中姿态的调整与圆弧上的点的姿态无关。
MoveC指令的指令格式如下:
MoveC CirPoint,ToPoint,Speed,Zone,Tool;
1)MoveC指令代码
2)CirPoint圆弧上的点,存储一个robtarget型数据
3)ToPoint圆弧终点,存储一个robtarget型数据
4)Speed移动速度
5)Zone转弯半径
6)tooL工具编号
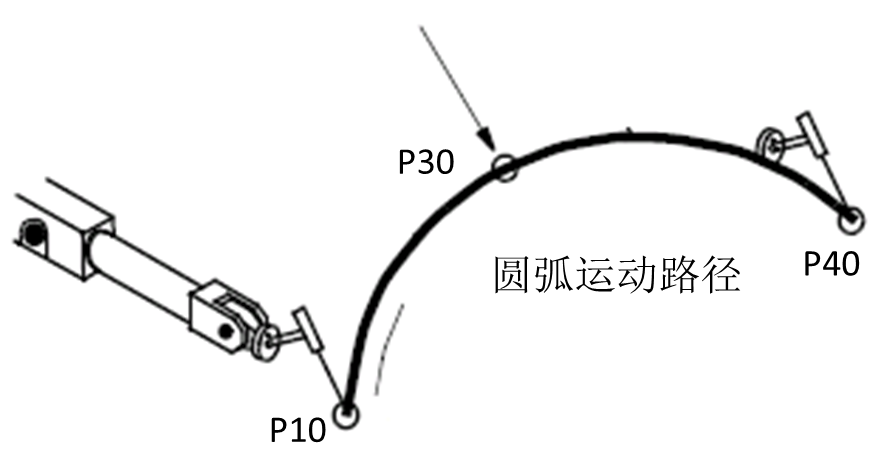
例:MoveC p1, p2, v500, z30, tool2;
工具tool2的TCP沿圆弧移动至位置p2,其速度数据为v500 且转弯半径区域数据为z30。根据起始位置、圆周点p1和目的点p2,确定该圆弧。圆弧运动指令的运动轨迹示意,如图4-83所示:
MoveC指令的指令格式如下:
MoveC CirPoint,ToPoint,Speed,Zone,Tool;
1)MoveC指令代码
2)CirPoint圆弧上的点,存储一个robtarget型数据
3)ToPoint圆弧终点,存储一个robtarget型数据
4)Speed移动速度
5)Zone转弯半径
6)tooL工具编号
例:MoveC p1, p2, v500, z30, tool2;
工具tool2的TCP沿圆弧移动至位置p2,其速度数据为v500 且转弯半径区域数据为z30。根据起始位置、圆周点p1和目的点p2,确定该圆弧。圆弧运动指令的运动轨迹示意,如图4-83所示:
 粤公网安备 44190002001278
粤公网安备 44190002001278





