MoveC指令有可选变量吗?
时间:2021-04-22 16:17
来源:
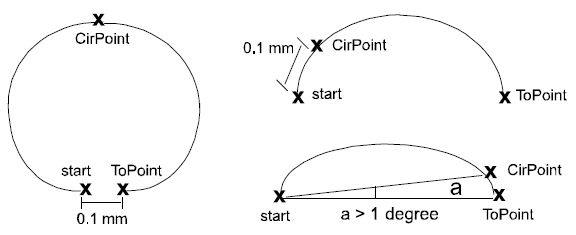
东莞自动化培训专家表示,在MoveC指令中Cirpoint与Topoint间存在一些位置限制关系,见图4-84:
图4- 84
1.起点与ToPoint之间的最小距离为0.1 mm
2.起点与CirPoint之间的最小距离为0.1 mm
3.起点的CirPoint与ToPoint之间的最小角度为1度
MoveC指令与其他运动指令一样,有可选变量可供使用。接下来我们对运动指令中常用的可选变量的功能作用进行说明:
(1)[ \NoEOffs ] MoveAbsJ指令独有的可选变量,数据类型:switch。启用该可选变量时,MoveAbsJ的运动将不受外轴有效偏移量的影响。如机器人未配置外轴,是否启用该变量则没有区别。在程序中添加MoveAbsJ指令时,系统默认启用[ \NoEOffs ]可选变量。
(2)[ \V ] 该可选变量用于规定指令中TCP的速率,以mm/s计。[ \V ]后面的值将取代速度数据中指定的以mm/s为单位的可选变量。[ \T ]可选变量与[ \V ]可选变量不可同时启用。以下是启用了[ \V ]可选变量的运动指令:
MoveJ p10, v200, fine, Tool0;
MoveL p20, v200, fine, Tool0;
MoveL p30, v200\V:=40, fine, Tool0;
MoveL p40, v200\V:=1000, fine, Tool0;
MoveJ p10, v200\V:=1000, fine, Tool0;
大家可以在机器人上运行以上指令,以验证[ \V ]可选变量所带来的变化。
(3)[ \T ] 该可选变量用于规定完成运动指令所定义的轨迹所需的时间,数据类型为num。启用该可选变量时原指令中的speeddata数据将失去作用,完成运动轨迹所需的时间由[ \T ]后面的值所决定,单位为秒。[ \T ]可选变量与[ \V ]可选变量不可同时启用。以下工业机器人培训专家启用了[ \T ]可选变量的运动指令:
MoveJ p10, v200, fine, MyTool;
MoveL p20, v200\T:=10, fine, MyTool;
MoveL p30, v200\T:=20, fine, MyTool;
MoveL p40, v200\T:=5, fine, MyTool;
MoveJ p10, v200\T:=5, fine, MyTool;
大家可以在机器人上运行以上指令,以验证[ \T ]可选变量所带来的变化。
(4)[ \WObj ] 该可选变量用于规定运动指令与中机器人位置关联的工件坐标系。如果未启用该可选变量,运动指令中目标的坐标值是世界坐标系下的坐标值。以下是启用了[ \WObj ]可选变量的运动指令:
MoveJ p10, v200, fine, tool0;
MoveJ p10, v200, fine, tool0\WObj:=wobj1;
大家可以在机器人上运行以上指令,以验证[ \WObj ]可选变量所带来的变化。对于以上指令,成功对比出启用[ \WObj ]所带来的变化的前提是,已经创建了与世界坐标系不一致的工件坐标系wobj1。
|
|
|
|
|
|
1.起点与ToPoint之间的最小距离为0.1 mm
2.起点与CirPoint之间的最小距离为0.1 mm
3.起点的CirPoint与ToPoint之间的最小角度为1度
MoveC指令与其他运动指令一样,有可选变量可供使用。接下来我们对运动指令中常用的可选变量的功能作用进行说明:
(1)[ \NoEOffs ] MoveAbsJ指令独有的可选变量,数据类型:switch。启用该可选变量时,MoveAbsJ的运动将不受外轴有效偏移量的影响。如机器人未配置外轴,是否启用该变量则没有区别。在程序中添加MoveAbsJ指令时,系统默认启用[ \NoEOffs ]可选变量。
(2)[ \V ] 该可选变量用于规定指令中TCP的速率,以mm/s计。[ \V ]后面的值将取代速度数据中指定的以mm/s为单位的可选变量。[ \T ]可选变量与[ \V ]可选变量不可同时启用。以下是启用了[ \V ]可选变量的运动指令:
MoveJ p10, v200, fine, Tool0;
MoveL p20, v200, fine, Tool0;
MoveL p30, v200\V:=40, fine, Tool0;
MoveL p40, v200\V:=1000, fine, Tool0;
MoveJ p10, v200\V:=1000, fine, Tool0;
大家可以在机器人上运行以上指令,以验证[ \V ]可选变量所带来的变化。
(3)[ \T ] 该可选变量用于规定完成运动指令所定义的轨迹所需的时间,数据类型为num。启用该可选变量时原指令中的speeddata数据将失去作用,完成运动轨迹所需的时间由[ \T ]后面的值所决定,单位为秒。[ \T ]可选变量与[ \V ]可选变量不可同时启用。以下工业机器人培训专家启用了[ \T ]可选变量的运动指令:
MoveJ p10, v200, fine, MyTool;
MoveL p20, v200\T:=10, fine, MyTool;
MoveL p30, v200\T:=20, fine, MyTool;
MoveL p40, v200\T:=5, fine, MyTool;
MoveJ p10, v200\T:=5, fine, MyTool;
大家可以在机器人上运行以上指令,以验证[ \T ]可选变量所带来的变化。
(4)[ \WObj ] 该可选变量用于规定运动指令与中机器人位置关联的工件坐标系。如果未启用该可选变量,运动指令中目标的坐标值是世界坐标系下的坐标值。以下是启用了[ \WObj ]可选变量的运动指令:
MoveJ p10, v200, fine, tool0;
MoveJ p10, v200, fine, tool0\WObj:=wobj1;
大家可以在机器人上运行以上指令,以验证[ \WObj ]可选变量所带来的变化。对于以上指令,成功对比出启用[ \WObj ]所带来的变化的前提是,已经创建了与世界坐标系不一致的工件坐标系wobj1。
 粤公网安备 44190002001278
粤公网安备 44190002001278





