智通机器人培训专家教您处理靠近奇点与轴配置的错误
时间:2021-04-23 17:27
来源:
靠近奇点与轴配置错误的处理办法
在使用执行运动指令的过程中,有时会发生轴配置错误和太靠近奇异点的报警,在本小节将介绍这两种错误产生的原因和处理方法。1.什么是轴配置错误?
工业机器人培训老师解释说,对于直角坐标系空间中的一个点,机器人可能存在多种6个轴的角度组合方案,使得TCP以同样的姿态到达直角坐标系空间中的点。将一个可能的各轴角度组合方案称之为一个轴配置。图4-90展示了机器人各轴以不同的角度组合使得TCP以相同姿态移动到直角坐标系空间中同一个点的例子。
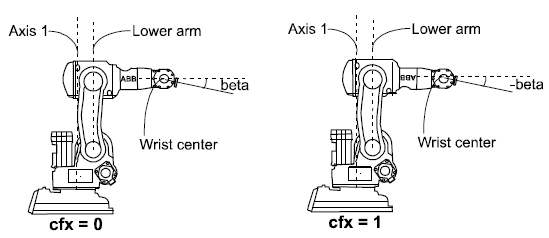
图4-90
当机器人无法按照指令中指定的轴配置方案移动到目标点位时,即称之为轴配置错误。
2.轴配置错误的解决方法
以手动模式逐步运行程序,找到导致轴配置错误的目标点位,并修改故障点重新对其分配轴配置方案。也可以通过使用ConfJOff、ConfLOff关闭控制系统对于轴配置的监控,避免轴配置错误的触发。
3.什么是靠近奇点错误
机器人的奇点(奇异点)是指使得机器人自由度退化、逆运动学无解的空间位置。对于6轴串联关节机器人有三种奇异点:腕部奇异点、肩部奇异点、肘部奇异点。
(1)腕部奇异点 当4轴与6轴平行时(即5轴处于0度时),机器人即处于腕部奇异点;
(2)肩部奇异点 当4轴与5轴的交点,位于1轴的旋转轴线上时,机器人即处于肩部奇异点;
(3)肘部奇异点 当2轴与3轴的轴线处于同一直线上时,机器人即处于肘部奇异点。
当机器人位于奇异点时,将会导致控制器无法随意控制机器人朝想要的方向运动、某些关节角速度趋近于失控等危险的情况发生,所以当机器人接近于奇异点时,机器人控制器会强行终止机器人的线性运动并触发错误报警。
4.那靠近奇点怎么办?怎么解决?且看东莞自动化培训专家的解决方法!如下:
手动模式下逐步运行程序,找到导致报警的运动指令,修改其目标点坐标值或修改其目标点的姿态从而改变机器人路径,使之远离奇异点。或使用SingArea Wrist指令,使得机器人在接近奇异点时允许轻微改变TCP姿态,以绕过奇异点。
 粤公网安备 44190002001278
粤公网安备 44190002001278





