工业机器人搬运程序难?来来来,告诉你最简单的方法!
时间:2021-05-15 11:36
来源:
一个最简单的搬运程序
通过东莞工业机器人培训专家在前几篇文章的介绍,相信大家已经可以进行简单的程序编写了。本文继续追随东莞工业机器人培训专家的脚步,根据前面的知识储备进行一个简单的搬运程序编写。
任务描述:
机器人从PHome点开始,移动至夹取点P10,夹取物料后安全移动至放置点P20,放置物料后再回到PHome点。如图7-1所示。其中p30和p40分别为垂直于p10和p20的过渡点。
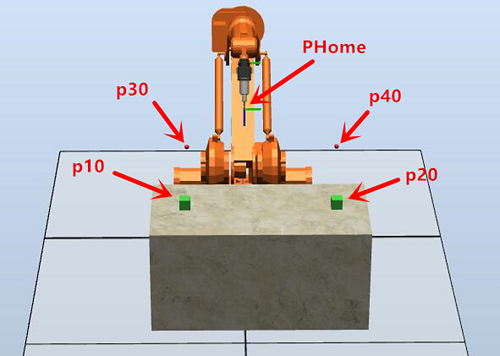
图7-1
配置说明:

任务要求:
夹取和放置动作添加0.5s延时。
按照搬运要求,程序编辑如下:
PROC main()
MoveJ pHome, v1000, z50, tool1;!移动至home点
MoveJ p30, v1000, z10, tool1;!移动至取料点p10上方过渡点p30
MoveL p10, v1000, fine, tool1;!准确移动至取料点p10,转弯半径用fine
Set do_1;!夹取物料
WaitTime 0.5;!延时0.5秒,等待物料被夹稳
MoveL p30, v1000, z10, tool1;!线性移动至过渡点p30
MoveJ p40, v1000, z10, tool1;!移动至放置点p20上方的过渡点p40
MoveL p20, v1000, fine, tool1;!准确移动至放置点p20
Reset do_1;!松开夹爪,放置物料
WaitTime 0.5;!延时0.5秒,等待物料被放好
MoveL p40, v1000, z10, tool1;!线性移至过渡点p40
MoveJ pHome, v1000, fine, tool1;!回到home点,搬运完成
ENDPROC

过渡点的设定,一方面是根据编程需要,一方面也需要根据实际空间布局进行考虑。
巧用waittime等待指令,能保证程序平稳、安全运行。本小节的搬运练习中,延时0.5秒的作用就是防止物料没有放好,机器人马上动作会使物料跟随动作的情况发生。
如果set、reset前有moveJ/moveL/moveC/moveABSJ等运动指令,转弯区指令必须使用fine才可以准确输出IO信号状态的变化。
想了解更多东莞工业机器人培训资讯?智通教育20年致力于东莞工业机器人培训、PLC培训、电工培训等培训项目,详情联系:0769-8707-8535.
 粤公网安备 44190002001278
粤公网安备 44190002001278





