IRB360机器人工具、IRB360机器人有效载荷
时间:2021-06-24 10:26
来源:
IRB360机器人工具
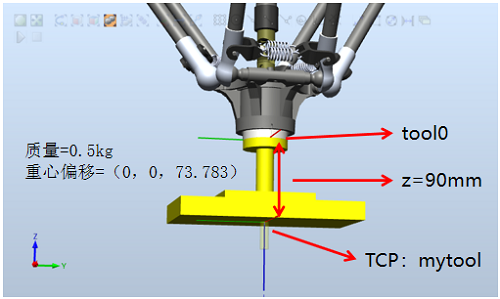
操作演示创建工具坐标系,直接输入法设定。
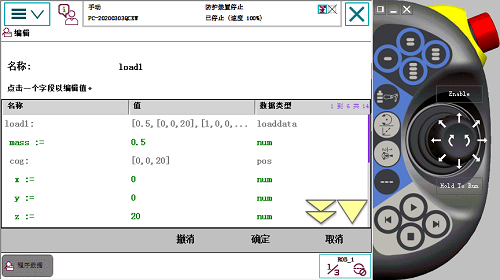
IRB360机器人有效载荷
想了解更多东莞工业机器人培训资讯?智通教育20年致力于东莞工业机器人培训、PLC培训、电工培训等培训项目,详情联系:0769-8707-8535.
IRB360机器人工具直接输入数据
IRB360机器人工具坐标系使用直接输入法数据tooldata:mytool
IRB360机器人工具直接输入数据
操作演示创建工具坐标系,直接输入法设定。
IRB360机器人有效载荷
IRB360机器人有效载荷数据loaddata
工业机器人培训老师表示,对于搬运取件应用的机器人,除了应该正确设定夹具的质量、重心、tooldata还有搬运对象的质量,还有重心数据 loaddata。要设定一个负荷数据,即有效载荷数据,设定负荷重量和重心。
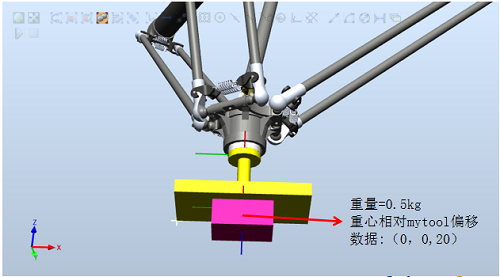
有效载荷的重量可以通过各种办法获取,也可以估计。对于有效载荷重心的X、Y、Z数值,是相对抓取产品的夹具或者吸盘的工具坐标系的偏移量。
有效载荷数据相对吸盘mytool工具坐标系的偏移数据,具体如下图所示:
IRB360机器人有效载荷数据
有效载荷数据相对吸盘mytool工具坐标系的偏移数据,具体如下图所示:吸盘中心对准产品中心
有效载荷数据相对吸盘mytool工具坐标系的偏移数据,具体如下图所示:
IRB360机器人有效载荷数据指令gripload

想了解更多东莞工业机器人培训资讯?智通教育20年致力于东莞工业机器人培训、PLC培训、电工培训等培训项目,详情联系:0769-8707-8535.
 粤公网安备 44190002001278
粤公网安备 44190002001278





