IRB360机器的编码器选型要求是怎样的?
时间:2021-07-06 17:24
来源:
IRB360机器手动关节操作
DSQC377B介绍
编码器选型要求
DSQC377B和编码器接线
DSQC377B在仿真软件当中的创建
DSQC377B输送链跟踪板创建与DSQC651等IO板创建一致。实际当中,编码器接线准确,创建DSQC377B板,完成相关设置就可以使用。创建选择来自模板,地址设定为11,另外创建DSQC651IO板地址10。

DSQC377B介绍
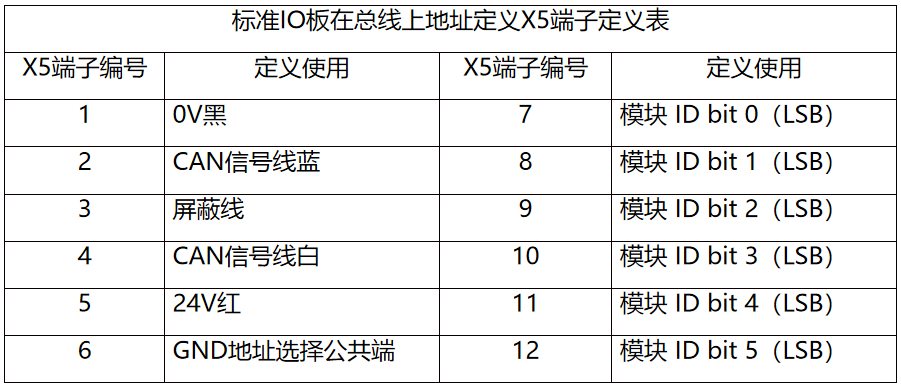
工业机器人培训专家表示,X5板卡电源端子排各个接线口使用定义,默认出厂剪线8号和10号脚,所以地址十进制10=2+8。
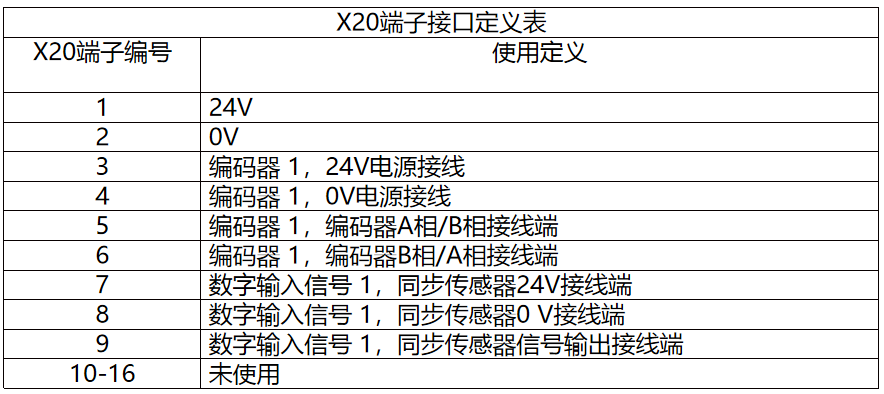
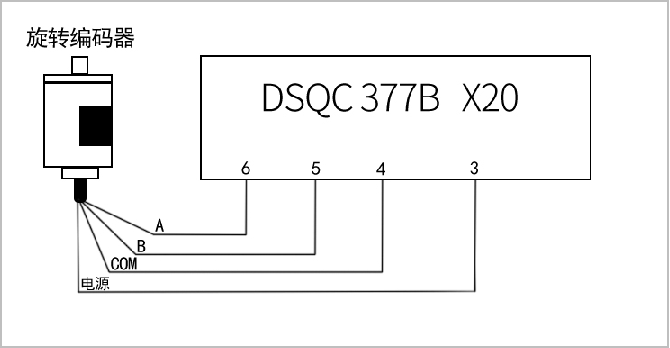
X20板卡电源端子排各个接线口使用定义。实际接线时,方向反向时候更改编码器A相B相即可。
编码器选型要求
编码器根据输送链的运动输出相应的脉冲数,此脉冲数用来调协机器人与输送链运动。输送链所选择编码器相位差一般为90度,即A相与B相的相位差为90度。对于编码器脉冲频率有以下要求:
不管采用何种方式安装,当输送链每运行1米时,编码器输出脉冲个数需要在1250-5000之间;
控制器软件同时采集A相、B相的上升沿和下降沿个数,一个周期内采集4个计算信号,即当输送链每运动1米时,控制器软件接收到的计算信号个数在5000-10000之间;
对于每运动1米接收到信号个数,如果少于5000是会影响机器人跟踪精度,如果多余10000时也不会提升机器人跟踪精度;
编码器选择蓝宝公司为例进行了解:Lenord&Bauer GEL 262
控制器软件采集计算信号频率范围为40个/秒-20000个/秒,以输送链没运行1米控制器软件采集10000个计算信号为例,输送链运行的最低速度为4mm/s,最高速度为2000mm/s.
DSQC377B和编码器接线
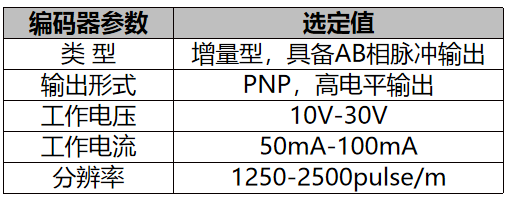
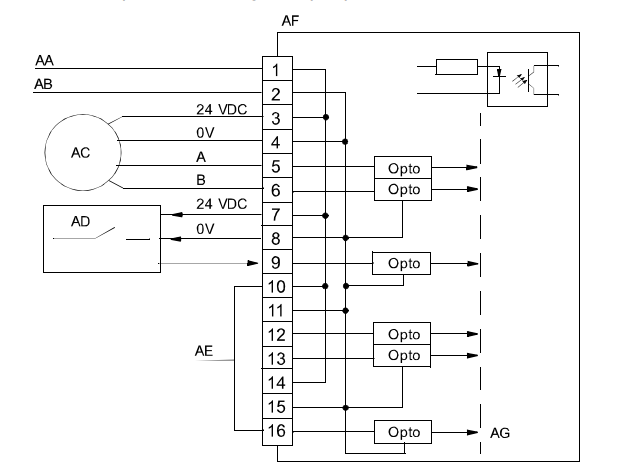
DSQC377B的X20板卡和编码器接线。实际接线时,方向反向时候更改编码器A相B相即可。用于传输带跟踪的编码器,一般选用PNP输出类型的增量式编码器,编码器分辨率的选择与编码器的安装形式有关。不管何种安装形式,只需满足传输带表面运行1米(至少1米),编码器发出1250-2500脉冲数即可,更高的编码器分辨率对于跟踪精度也没有提高作用。
DSQC377B的X20端子接线。 对于同步开关,一般选择PNP型传感器,对应接入X20已经定义好的端口,如下图AD为传感器开关。
DSQC377B在仿真软件当中的创建
DSQC377B输送链跟踪板创建与DSQC651等IO板创建一致。实际当中,编码器接线准确,创建DSQC377B板,完成相关设置就可以使用。创建选择来自模板,地址设定为11,另外创建DSQC651IO板地址10。
 粤公网安备 44190002001278
粤公网安备 44190002001278





