工业机器人培训学校—工业机器人培训机构—IRB360并联机器人输送链相关指令
时间:2021-07-14 15:03
来源:
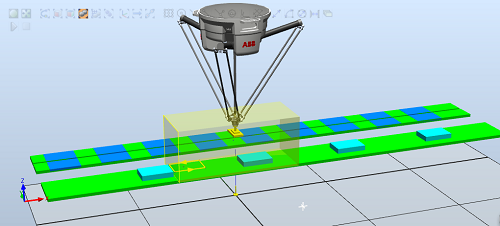
工业机器人编程专家表示,在工业生产中,经常使用IRB360并联机器人和输送链协同工作对产品进行分拣工作。对于ABB仿真软件,有输送链选项,可以把其他软件做好的工作站导入仿真软件,创建输送链,协同机器人工作共同完成某些工作功能任务等。本节课主要了解IRB360机器人输送链创建,走四边形轨迹编程、取料放料编程,并调试运行。
输送链相关指令
1.1 ActUnit - 启用机械单元
ActUnit用于启用机械单元。其可以用于确定,例如,当使用公共驱动单元时,应启用哪一个单元。本指令仅可用于主任务T_ROB1,或者如果在MultiMove系统中,则可用于运动任务中。指令参数:ActUnit MechUnit,参数MechUnit是数据类型mecunit,待启用机械单元的名称。
举例:
ActUnit orbit_a;
orbit_a机械单元启用。
1.2 DeactUnit - 停用机械单元
DeactUnit用于停用机械单元。其可以用于确定,例如,当使用公共驱动单元时,应启用哪一个单元。本指令仅可用于主任务T_ROB1,或者如果在MultiMove系统中,则可用于运动任务。当机械臂和外轴的实际路径就绪时,清除当前路径等级上的路径,并停用指定的机械单元。这意味着既不对其进行控制,亦不对其进行监测,直至重新启用为止。
举例:
MoveL p10, v100, fine, tool1;
DeactUnit track_motion;
MoveL p20, v100, z10, tool1;
MoveL p30, v100, fine, tool1;
ActUnit track_motion;
MoveL p40, v100, z10, tool1;
当机械臂运动至p20和p30时,单元track_motion将固定。此后,机械臂与track_motion均将移动至p40


1.3 WaitWObj - 等待传送带上的工件
WaitWObj(Wait Work Object)连接至传送带机械单元起动窗口中的一个工件。工业机器人培训哪家好?如果起动窗口中不存在任何对象,则程序执行进入等待。如果存在一个工件,则将对象与传送带相连,并继续执行。
指令参数:WaitWObj WObj [ RelDist ][MaxTime][TimeFlag]
WObj:数据类型wobjdata,运动中的工件(坐标系)与指令中的机械臂位置相关。通过工件中的ufmec,指定机械单元传送带。
RelDist:数据类型num,等待一个对象进入起动窗口,并超出本参数指定的距离。如果已经连接工件,则执行等待,直至对象通过给定的距离。如果对象已通过RelDist,则继续执行。
MaxTime:数据类型num,允许的最长等待时间,以秒计。
TimeFlag:数据类型bool,如果在实现对象连接或Reldist之前,耗尽最长允许等待时间,则包含该值的输出参数为TRUE。
举例1:
WaitWObj wobj_on_cnv1RelDist:=500.0;
如果未连接,则等待对象进入起动窗口,随后,等待对象通过传送带上的500mm点。如果已经同对象相连,则等待对象通过500 mm。如果未连接,则等待起始窗口中的对象。
举例2:
WaitWObj wobj_on_cnv1RelDist:=0.0;
如果已经连接,则当对象已经通过0.0 mm时,继续执行。
举例:3:
WaitWObj wobj_on_cnv1RelDist:=500.0MaxTime:=0.1 Timeflag:=flag1;
如果对象已通过500 mm,WaitWobj将立即返回,否则,将等待一个对象0.1秒。如果在这0.1期间,无对象通过500 mm,则当标志1=TRUE时,本指令将返回。
1.4 DropWObj - 使工件落于传送带上
DropWObj(Drop Work Object)用于与当前工件断开,且针对传送带上的下一个工件的程序已经就绪。使工件下落意味着编码器单元不再跟踪工件。从工件队列移除工件,且无法恢复。
指令参数:DropWObj WObj,wobj数据类型wobjdata,运动中的工件(坐标系)与指令中的机械臂位置相关。通过工件中的ufmec,指定机械单元传送带。
举例:
MoveL *, v1000, z10, tool, WObj:=wobj_on_cnv1;
MoveL *, v1000, fine, tool, WObj:=wobj0;
DropWObj wobj_on_cnv1;
MoveL *, v1000, z10, tool, WObj:=wobj0;
 粤公网安备 44190002001278
粤公网安备 44190002001278





