工业机器人培训学校,工业机器人培训机构,IRB360机器人输送链工作站创建
时间:2021-07-21 18:05
来源:
工业机器人培训学校,工业机器人培训机构 输送链工作站创建

1.2 IRB360机器人布局选项

1.3 IRB360机器人建模与位置设定

 2.2 工作站DSQC651信号的创建
2.2 工作站DSQC651信号的创建

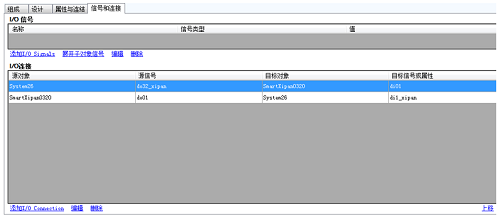
机器人系统的输出do32_xipan对应smart吸盘的di1,吸盘smart的输出do1对应机器人系统di1_xipan.
 工业机器人培训学校--智通教育20年致力于东莞工业机器人培训、PLC培训、电工培训等培训项目,详情联系:0769-8707-8535.
工业机器人培训学校--智通教育20年致力于东莞工业机器人培训、PLC培训、电工培训等培训项目,详情联系:0769-8707-8535.
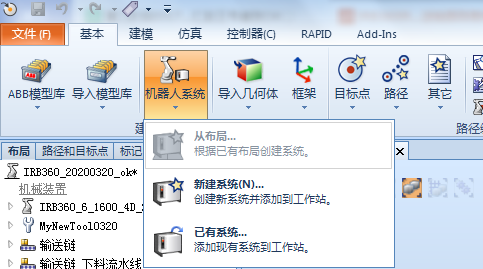
1.1 IRB360机器人导入
基本——>ABB模型库——>IRB360机器人单击导入。
1.2 IRB360机器人布局选项
基本——>机器人系统——>布局——>语言、709-1devicenet与606-1conveyor tracker,其余的根据实际情况购买选择各个选项。
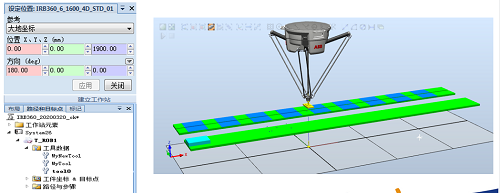
1.3 IRB360机器人建模与位置设定
如下图所示,设定机器人位置,建模并把输送链位置放置好。导入两个工具mytool和myNewtool
2.1 工作站DSQC377B跟踪板创建和DSQC651板创建
2.3 吸盘工具smart组件的工作站逻辑设定
机器人系统的输出do32_xipan对应smart吸盘的di1,吸盘smart的输出do1对应机器人系统di1_xipan.
 粤公网安备 44190002001278
粤公网安备 44190002001278





