机器人培训专家为您介绍IRB360机器人坐标系,手动关节操作以及手动线性、重定位操作
时间:2021-08-16 17:44
来源:
一、 IRB360机器人坐标系
1.1 IRB360机器人坐标系
工业机器人培训找哪里最好?坐标系:ABB机器人使用若干坐标系,每一个坐标系都适用与特定类型的微动控制或者编程。
世界坐标系:也叫大地坐标系,在工作单元或工作站中固定位置及其相应零点,默认情况下世界坐标系和机器人基坐标系重合。但是IRB360机器人安装一般都是倒装,所以其基坐标与世界坐标系某些轴方向不一致。
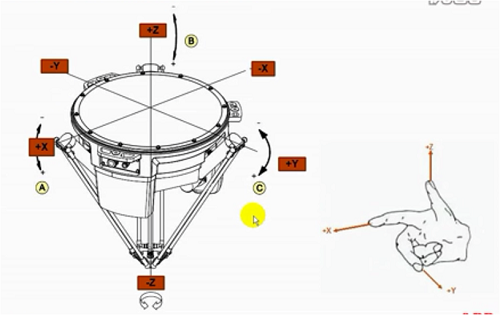
基座标系:原点固定于机器人基座,方向也是固定符合人站在机器人正后方朝前右手XYZ指向为正方向。
工具坐标系:定义机器人到达预定义目标点时候使用工具的位置,及参考点,一般工具坐标系原点缩写TCP,机器人运行就是将参照的TCP移动到编程目标点位置。
工件坐标系:定义工件相对于大地坐标系或者其他指定工件坐标系的位置,经常用于对机器人进行编程,一般记录点位都会根据产品在不同工件上面工作而选择不同工件坐标系来记录点位。
IRB360坐标系如下:
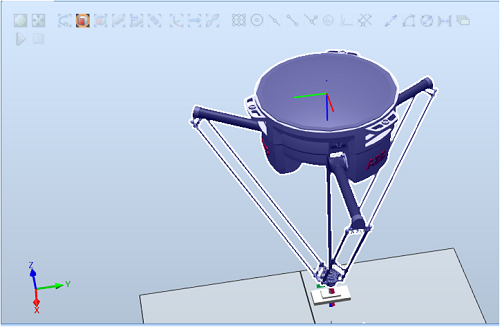
IRB360机器人世界坐标系:和其他机器人一样;
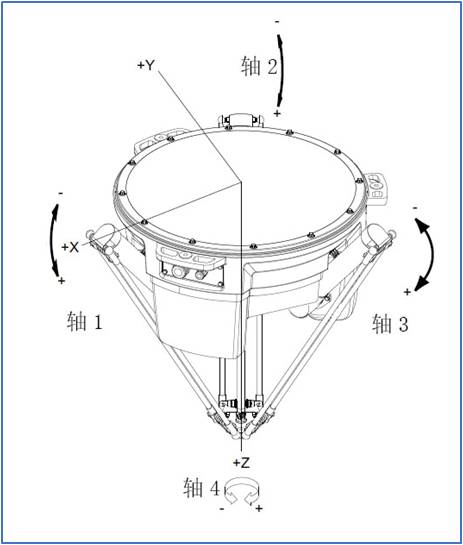
基座标系:如右图所示,Y、Z轴方向和世界坐标相反,单台机器人时候不在与世界坐标不重合;工业机器人培训找哪里最好?(安装并联机器人到框架支架上时候尽量让1轴和世界坐标X轴方向一致。)
工具坐标系:第四轴法兰中中心,Z轴方向垂直法兰平面;
工件坐标系:一般和输送链工作,使用输送链工件坐标系;
1.2 IRB360机器人基坐标系和世界坐标系
IRB360坐标系如下:
IRB360机器人世界坐标系:和其他机器人一样;
基座标系:如右图所示,Y、Z轴方向和世界坐标相反,单台机器人时候不在与世界坐标不重合;(安装并联机器人到框架支架上时候尽量让1轴和世界坐标X轴方向一致。)
工具坐标系:第四轴法兰中中心,Z轴方向垂直法兰平面;
工件坐标系:一般和输送链工作,使用输送链工件坐标系;
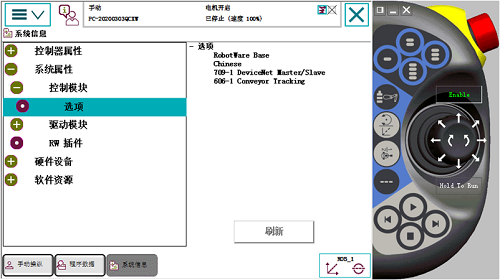
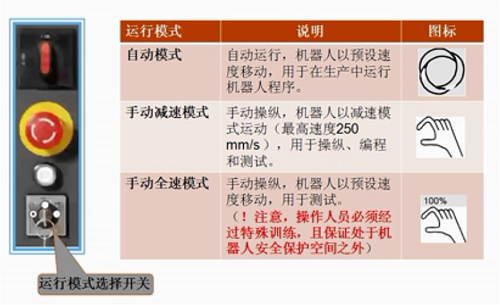
手动操作IRB360机器人各个关节轴时和6轴机器人相同,在控制柜上旋转要是开关到手动状态,然后进行手动操作。
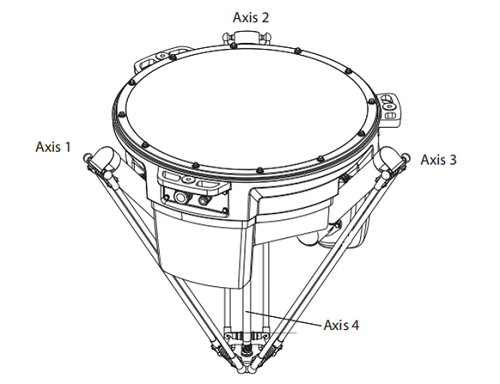
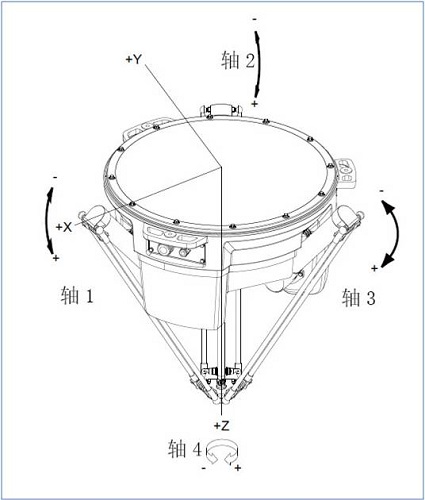
手动操作IRB360机器人各个关节轴时和6轴机器人相同,不同的是并联机器人IRB360机器人每个轴位置不同。1轴为动力电缆、编码器电缆最近的轴,然后2轴、3轴顺时针旋转,4轴为下面安装工具轴,具体见下示教器图片:

2.2 IRB360机器人四个关节轴
IRB360机器人一般都是四轴,每个轴如右图片。工业机器人培训找哪里最好?控制柜和机器人本体连接的动力线、编码线插头位置最近轴为1轴,顺时针旋转对应2轴、3轴,4轴为下面安装工具。
三、IRB360机器人手动线性、重定位操作
3.1 IRB360机器人手动线性操作
ABB并联IRB360机器人手动线性操作和6轴机器人操作一致,具体见操作演示。区域在于IRB360机器人倒挂安装在框架支架上,尽量让基座标系X轴和世界坐标系X轴方向相同,然后Y轴、Z轴方向和世界坐标系的相反。
ABB并联IRB360机器人手动线性操作和6轴机器人操作一致,具体见操作演示。。

3.2 IRB360机器人手动重定位运行
重定位是指机器人末端工具TCP位置不同,以TCP为中心绕着所选择坐标系的X、Y、Z轴做旋转运动,也可以理解为机器人绕着工具的TCP点做姿态调整。系统默认绕着工具坐标系做重定位运动。
ABB并联IRB360机器人手动线性操作和6轴机器人操作一致,一般只进行绕Z轴重定位运行,具体见实操。

3.3 IRB360机器人手动增量式操作
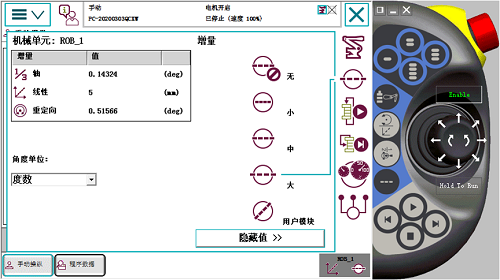
ABB并联IRB360机器人手动增量式操作和6轴机器人一致。采用增量式移动机器人,可以对机器人进行微小幅度调整,可以非常精确紧凑定位操作。
摇杆每偏转依次,机器人就移动一步增量值,如果摇杆偏移持续一秒钟或者数秒钟,机器人就会持续移动,速率为每秒10步。

ABB并联IRB360机器人手动增量式操作和6轴机器人一致。
四、课程总结
4.1 总结
本节课主要了解了IRB360并联机器人型号参数、应用、硬件组成、坐标系,手动关节、线性、重定位运行。还了解了机器人运输安装,了解各个关节轴和气管安装。熟练操作机器人,理解IRB360机器人和6轴机器人异同。
1.1 IRB360机器人坐标系
工业机器人培训找哪里最好?坐标系:ABB机器人使用若干坐标系,每一个坐标系都适用与特定类型的微动控制或者编程。
世界坐标系:也叫大地坐标系,在工作单元或工作站中固定位置及其相应零点,默认情况下世界坐标系和机器人基坐标系重合。但是IRB360机器人安装一般都是倒装,所以其基坐标与世界坐标系某些轴方向不一致。
基座标系:原点固定于机器人基座,方向也是固定符合人站在机器人正后方朝前右手XYZ指向为正方向。
工具坐标系:定义机器人到达预定义目标点时候使用工具的位置,及参考点,一般工具坐标系原点缩写TCP,机器人运行就是将参照的TCP移动到编程目标点位置。
工件坐标系:定义工件相对于大地坐标系或者其他指定工件坐标系的位置,经常用于对机器人进行编程,一般记录点位都会根据产品在不同工件上面工作而选择不同工件坐标系来记录点位。
IRB360坐标系如下:
IRB360机器人世界坐标系:和其他机器人一样;
基座标系:如右图所示,Y、Z轴方向和世界坐标相反,单台机器人时候不在与世界坐标不重合;工业机器人培训找哪里最好?(安装并联机器人到框架支架上时候尽量让1轴和世界坐标X轴方向一致。)
工具坐标系:第四轴法兰中中心,Z轴方向垂直法兰平面;
工件坐标系:一般和输送链工作,使用输送链工件坐标系;
1.2 IRB360机器人基坐标系和世界坐标系
IRB360坐标系如下:
IRB360机器人世界坐标系:和其他机器人一样;
基座标系:如右图所示,Y、Z轴方向和世界坐标相反,单台机器人时候不在与世界坐标不重合;(安装并联机器人到框架支架上时候尽量让1轴和世界坐标X轴方向一致。)
工具坐标系:第四轴法兰中中心,Z轴方向垂直法兰平面;
工件坐标系:一般和输送链工作,使用输送链工件坐标系;
二、IRB360机器手动关节操作
2.1 IRB360机器人手动关节操作
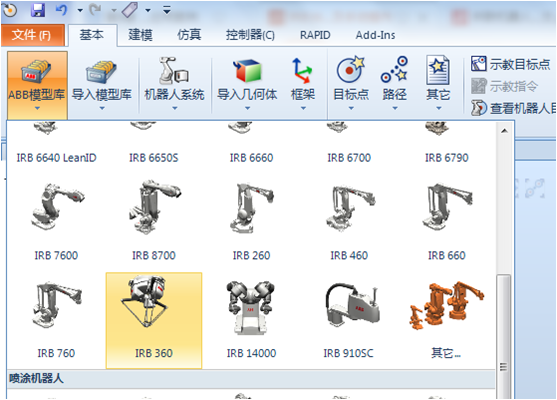
手动操作IRB360机器人工作站创建。
2.1 IRB360机器人手动关节操作
手动操作IRB360机器人工作站创建。
手动操作IRB360机器人各个关节轴时和6轴机器人相同,在控制柜上旋转要是开关到手动状态,然后进行手动操作。
手动操作IRB360机器人各个关节轴时和6轴机器人相同,不同的是并联机器人IRB360机器人每个轴位置不同。1轴为动力电缆、编码器电缆最近的轴,然后2轴、3轴顺时针旋转,4轴为下面安装工具轴,具体见下示教器图片:
2.2 IRB360机器人四个关节轴
IRB360机器人一般都是四轴,每个轴如右图片。工业机器人培训找哪里最好?控制柜和机器人本体连接的动力线、编码线插头位置最近轴为1轴,顺时针旋转对应2轴、3轴,4轴为下面安装工具。
IRB360机器人安装时候,尽量使得1轴方向通世界坐标系X轴方向。
三、IRB360机器人手动线性、重定位操作
3.1 IRB360机器人手动线性操作
ABB并联IRB360机器人手动线性操作和6轴机器人操作一致,具体见操作演示。区域在于IRB360机器人倒挂安装在框架支架上,尽量让基座标系X轴和世界坐标系X轴方向相同,然后Y轴、Z轴方向和世界坐标系的相反。
ABB并联IRB360机器人手动线性操作和6轴机器人操作一致,具体见操作演示。。
3.2 IRB360机器人手动重定位运行
重定位是指机器人末端工具TCP位置不同,以TCP为中心绕着所选择坐标系的X、Y、Z轴做旋转运动,也可以理解为机器人绕着工具的TCP点做姿态调整。系统默认绕着工具坐标系做重定位运动。
ABB并联IRB360机器人手动线性操作和6轴机器人操作一致,一般只进行绕Z轴重定位运行,具体见实操。
3.3 IRB360机器人手动增量式操作
ABB并联IRB360机器人手动增量式操作和6轴机器人一致。采用增量式移动机器人,可以对机器人进行微小幅度调整,可以非常精确紧凑定位操作。
摇杆每偏转依次,机器人就移动一步增量值,如果摇杆偏移持续一秒钟或者数秒钟,机器人就会持续移动,速率为每秒10步。
ABB并联IRB360机器人手动增量式操作和6轴机器人一致。
四、课程总结
4.1 总结
本节课主要了解了IRB360并联机器人型号参数、应用、硬件组成、坐标系,手动关节、线性、重定位运行。还了解了机器人运输安装,了解各个关节轴和气管安装。熟练操作机器人,理解IRB360机器人和6轴机器人异同。
 粤公网安备 44190002001278
粤公网安备 44190002001278





